W dynamice ciał stałych, zrozumienie ruchu postępowego i obrotowego jest fundamentalne. Pozwala nam analizować i przewidywać zachowanie się różnorodnych obiektów, od prostych klocków po skomplikowane maszyny i pojazdy. Ten artykuł ma na celu dogłębne omówienie tych dwóch rodzajów ruchu, ich wzajemnych zależności i przykładów z życia codziennego.
Ruch Postępowy (Translacyjny) Bryły Sztywnej
Definicja i Charakterystyka
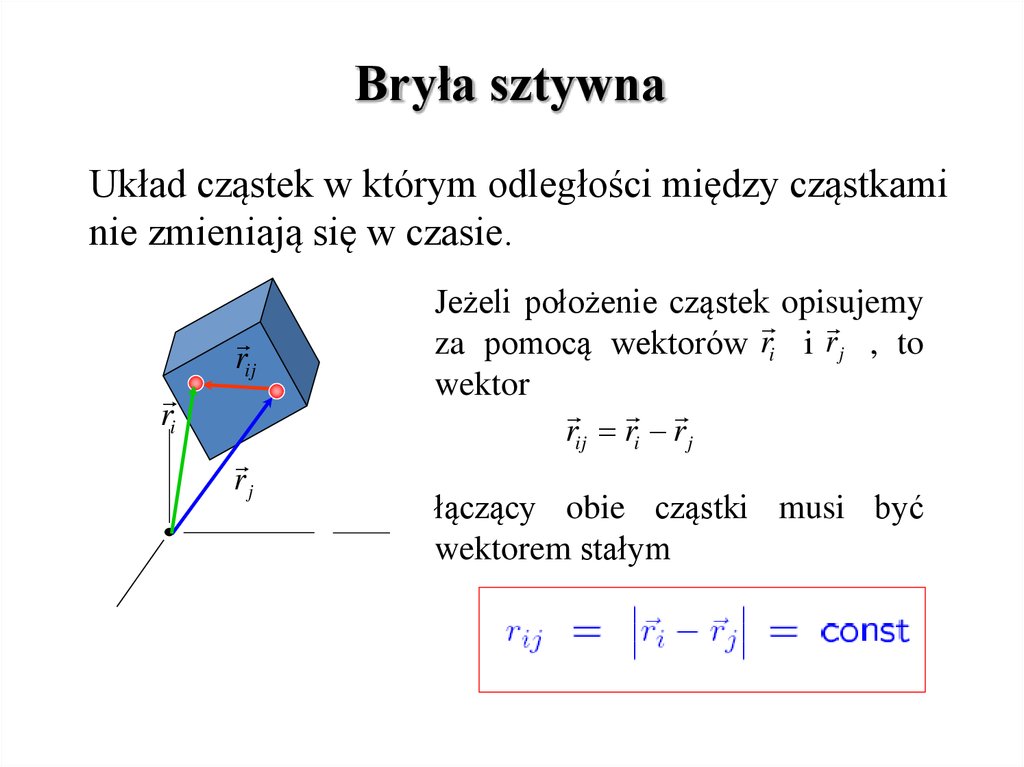
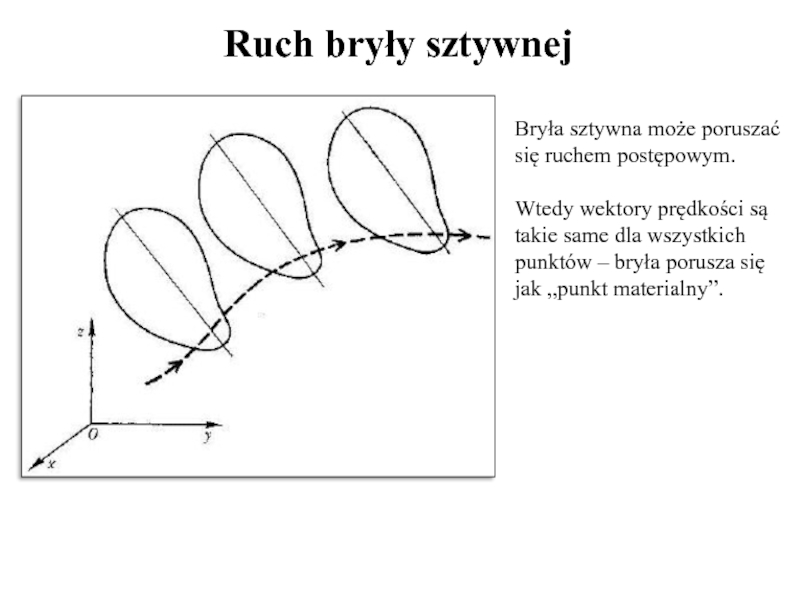
Ruch postępowy, znany również jako ruch translacyjny, charakteryzuje się tym, że wszystkie punkty bryły sztywnej poruszają się w identyczny sposób w danym momencie. Oznacza to, że każdy punkt opisuje taką samą trajektorię, a wektory prędkości i przyspieszenia są takie same dla wszystkich punktów ciała.
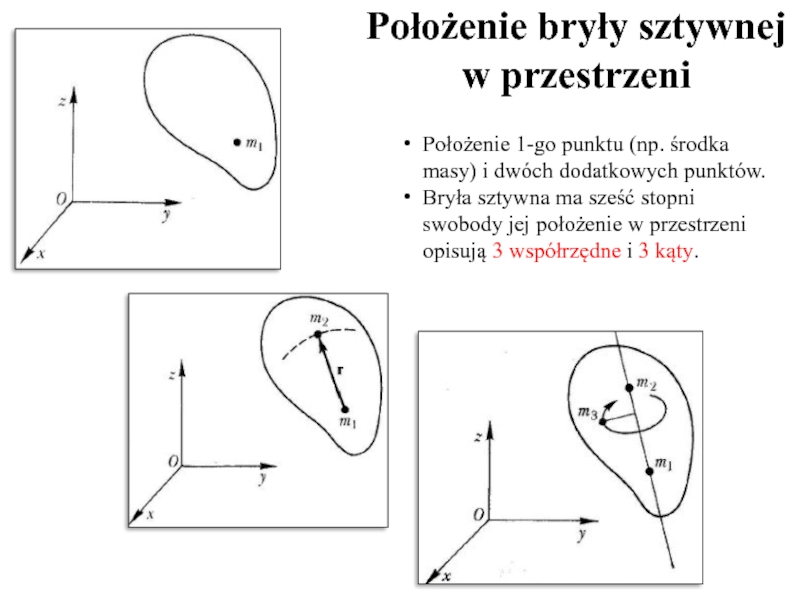
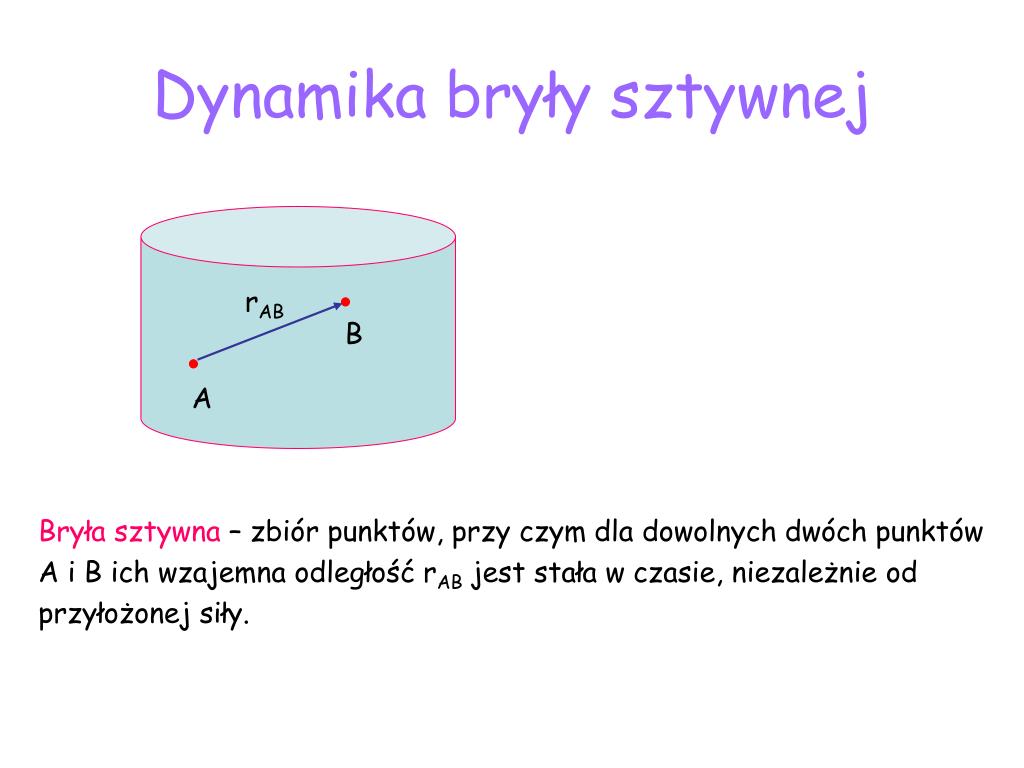
Bryła sztywna to idealizacja, w której odległość między dowolnymi dwoma punktami ciała pozostaje stała podczas ruchu. W rzeczywistości żadne ciało nie jest idealnie sztywne, ale to przybliżenie jest często wystarczające do analizy wielu problemów inżynierskich i fizycznych.
Must Read
Ruch postępowy można opisać za pomocą wektora położenia, prędkości i przyspieszenia dowolnego punktu bryły, ponieważ ruch reszty punktów jest z nim identyczny.
Równania Ruchu Postępowego
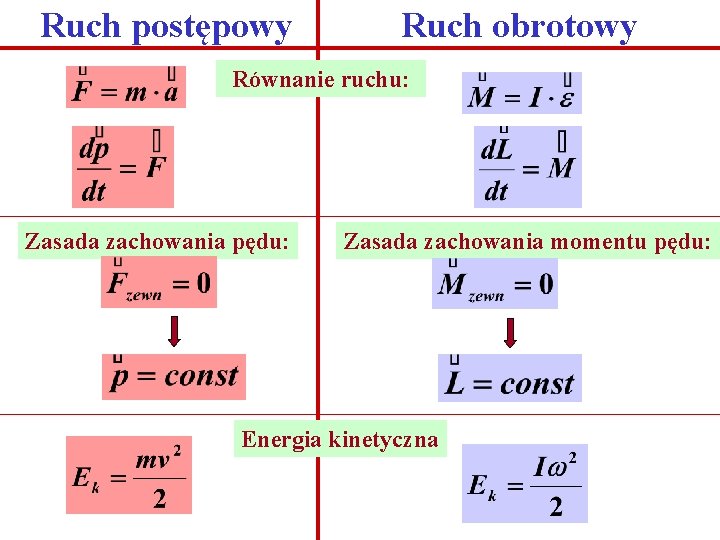
Podstawowe równania opisujące ruch postępowy bryły sztywnej są analogiczne do równań ruchu punktu materialnego. Druga zasada dynamiki Newtona w swojej translacyjnej formie stwierdza, że suma sił działających na bryłę jest równa iloczynowi masy bryły i przyspieszenia jej środka masy:
ΣF = m * aCM
Gdzie:
- ΣF to suma wektorowa wszystkich sił zewnętrznych działających na bryłę.
- m to masa bryły.
- aCM to przyspieszenie środka masy bryły.
Środek masy (CM) jest punktem, w którym można uważać, że skupiona jest cała masa ciała. Jego położenie oblicza się jako średnią ważoną położeń wszystkich punktów bryły, gdzie wagą każdego punktu jest jego masa.
Przykłady Ruchu Postępowego
Jazda samochodem po prostej drodze, ze stałą prędkością, jest przykładem ruchu postępowego. Wszystkie punkty samochodu (pomijając ruch obrotowy kół) poruszają się z tą samą prędkością i w tym samym kierunku.
Spadanie swobodne, zakładając pominięcie oporu powietrza i rotacji, również jest przykładem ruchu postępowego. Wszystkie punkty ciała spadają z takim samym przyspieszeniem ziemskim.
Ruch windy, gdy porusza się ona w górę lub w dół bez kołysania, jest kolejnym przykładem ruchu translacyjnego.
Ruch Obrotowy Bryły Sztywnej
Definicja i Charakterystyka
Ruch obrotowy, zwany też ruchem rotacyjnym, charakteryzuje się tym, że punkty bryły poruszają się po okręgach, których środki leżą na prostej zwanej osią obrotu. Oś obrotu może być nieruchoma w przestrzeni (np. obracający się wentylator) lub może się poruszać razem z ciałem (np. toczące się koło).
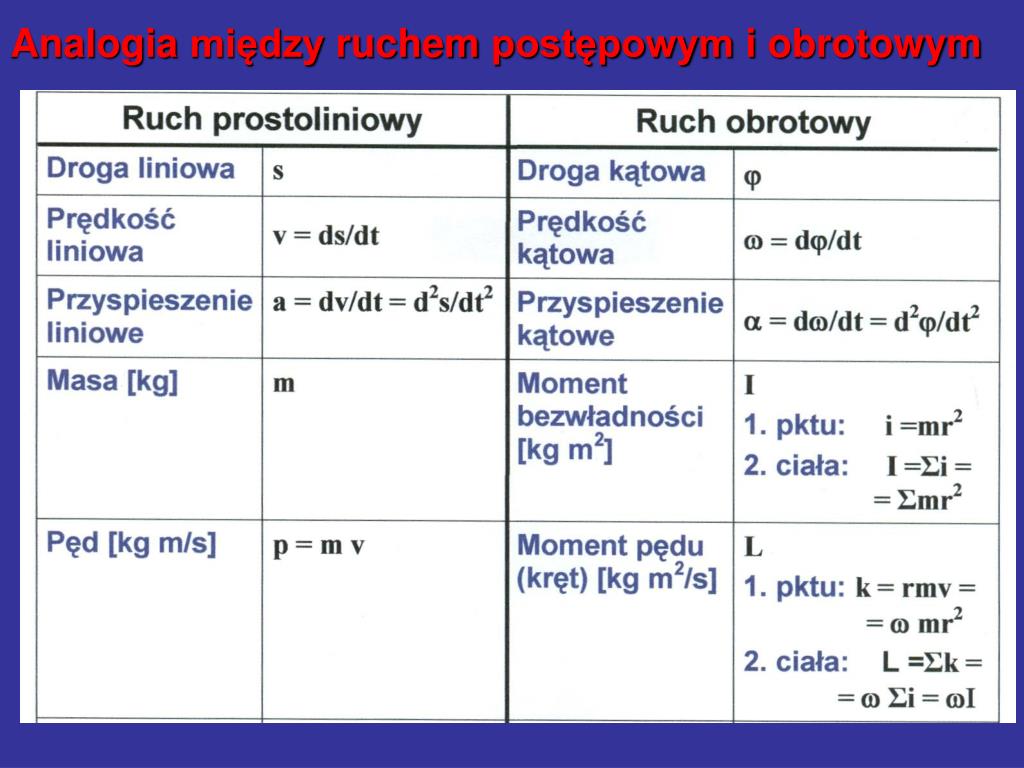
W ruchu obrotowym, kąt obrotu (θ) jest taki sam dla wszystkich punktów bryły w danym momencie. Podobnie, prędkość kątowa (ω) i przyspieszenie kątowe (α) są jednakowe dla wszystkich punktów. Jednakże, prędkość liniowa i przyspieszenie liniowe poszczególnych punktów zależą od ich odległości od osi obrotu.
Ruch obrotowy jest opisywany za pomocą wektorów prędkości kątowej i przyspieszenia kątowego, które są skierowane wzdłuż osi obrotu. Kierunek wektorów określa się za pomocą reguły śruby prawoskrętnej.
Równania Ruchu Obrotowego
Równania opisujące ruch obrotowy bryły sztywnej są analogiczne do równań ruchu postępowego, ale zamiast sił i mas używamy momentów sił i momentów bezwładności. Druga zasada dynamiki Newtona w swojej rotacyjnej formie stwierdza, że suma momentów sił działających na bryłę jest równa iloczynowi momentu bezwładności bryły względem osi obrotu i przyspieszenia kątowego:
Στ = I * α
Gdzie:
- Στ to suma wektorowa wszystkich momentów sił zewnętrznych działających na bryłę względem osi obrotu.
- I to moment bezwładności bryły względem osi obrotu.
- α to przyspieszenie kątowe bryły.
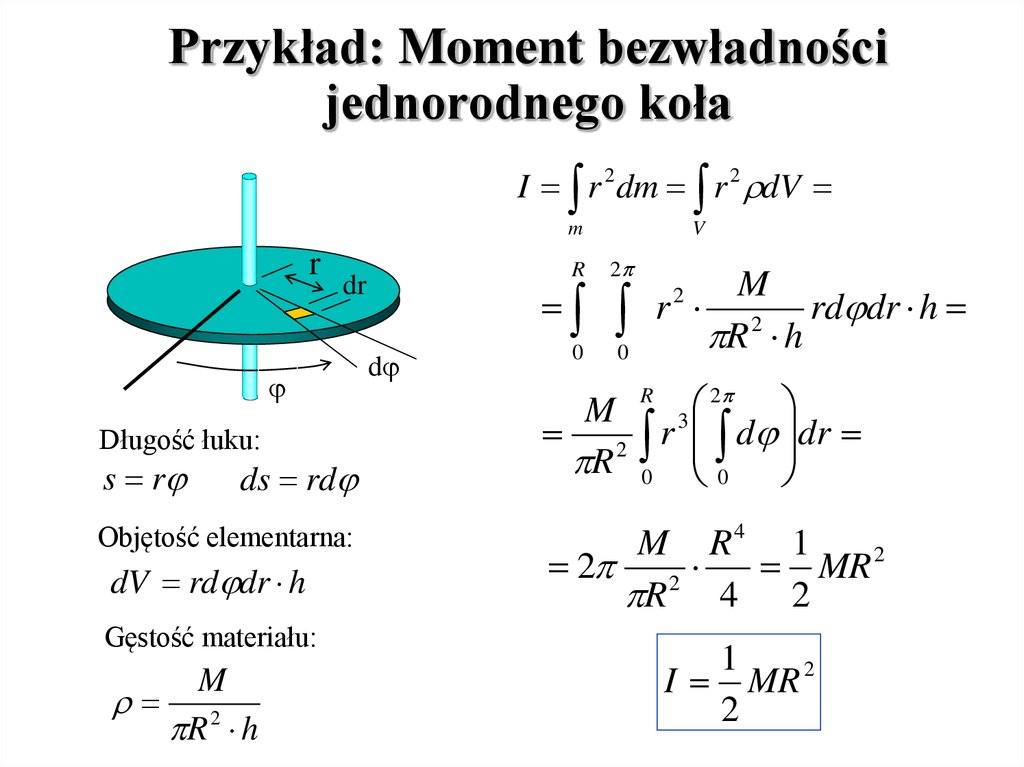
Moment bezwładności jest miarą oporu ciała na zmianę prędkości obrotowej. Zależy on od masy ciała i rozkładu tej masy względem osi obrotu. Im dalej od osi obrotu znajduje się masa, tym większy jest moment bezwładności.
Przykłady Ruchu Obrotowego
Obracający się wentylator jest klasycznym przykładem ruchu obrotowego. Łopatki wentylatora obracają się wokół osi, a prędkość kątowa i przyspieszenie kątowe są takie same dla wszystkich punktów na łopatkach.
Karuzela również ilustruje ruch obrotowy. Osoby na karuzeli poruszają się po okręgach, a prędkość kątowa karuzeli jest stała (lub zmienia się w czasie, gdy karuzela przyspiesza lub zwalnia).
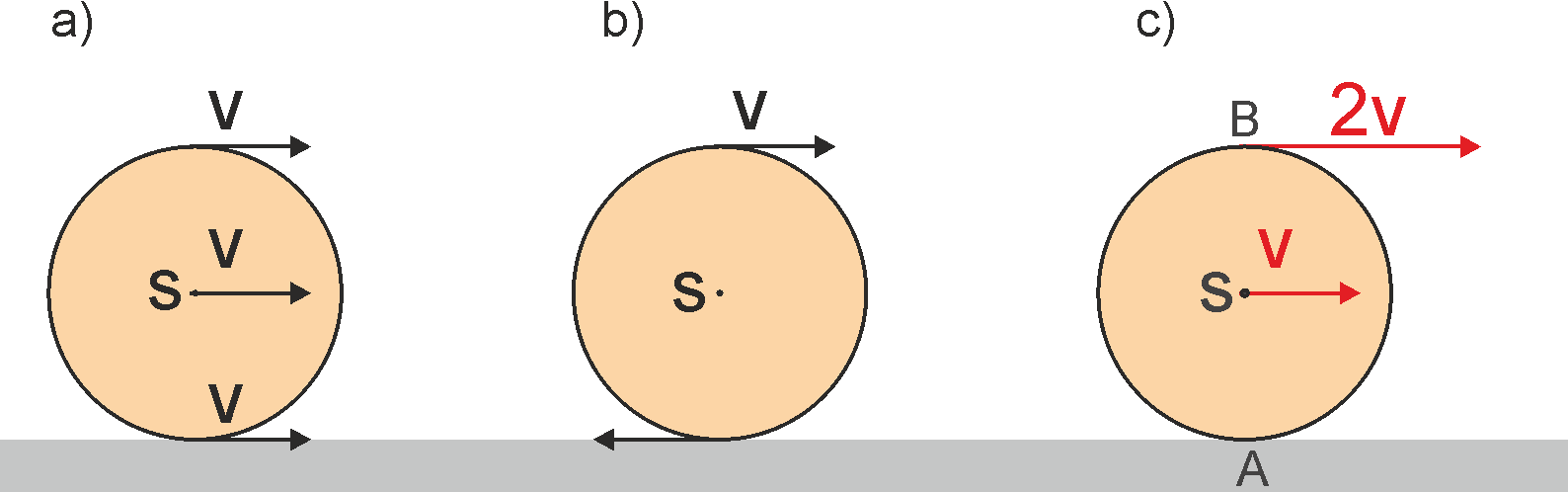
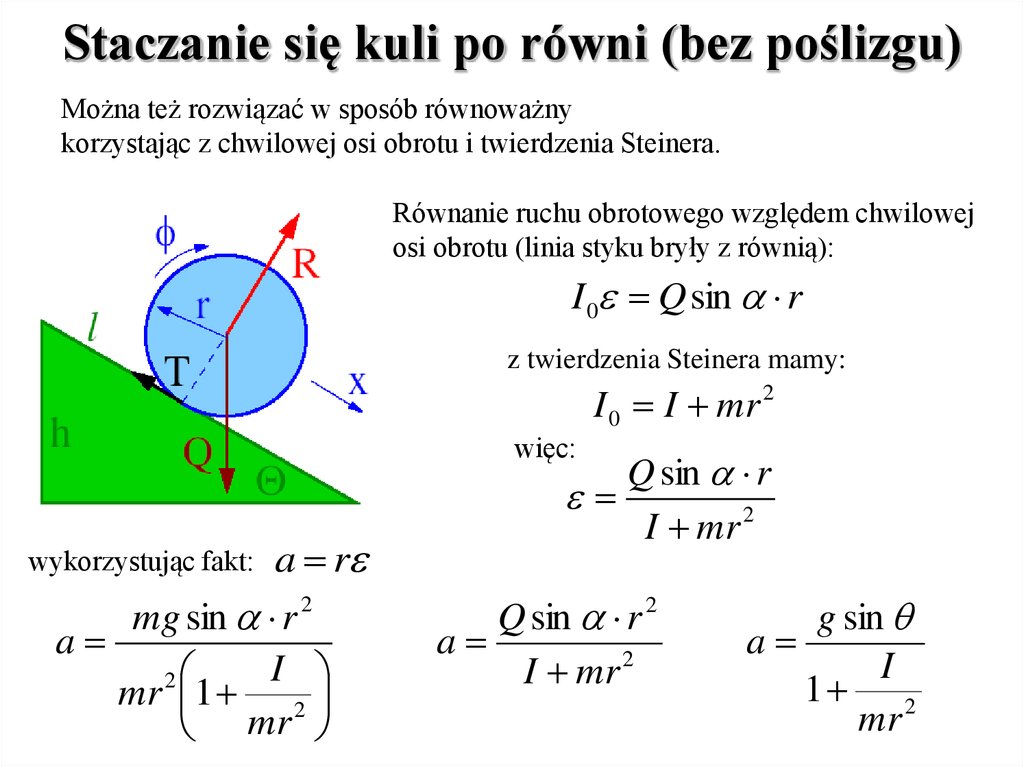
Toczace się koło jest przykładem bardziej skomplikowanego ruchu, który łączy ruch postępowy i obrotowy. Środek koła porusza się ruchem postępowym, a koło jednocześnie obraca się wokół swojej osi.
Ruch Złożony: Połączenie Ruchu Postępowego i Obrotowego
W wielu realnych sytuacjach, bryła sztywna wykonuje ruch, który jest połączeniem ruchu postępowego i obrotowego. Przykładem jest toczenie się koła, o którym wspomniano wcześniej. W takim przypadku, energia kinetyczna bryły jest sumą energii kinetycznej ruchu postępowego i energii kinetycznej ruchu obrotowego:
Ek = 1/2 * m * vCM2 + 1/2 * I * ω2
Gdzie:
- Ek to całkowita energia kinetyczna.
- m to masa bryły.
- vCM to prędkość środka masy.
- I to moment bezwładności bryły względem osi obrotu.
- ω to prędkość kątowa.
Innym przykładem jest ruch wahadła. Wahadło porusza się ruchem obrotowym wokół punktu zawieszenia, ale jednocześnie jego środek masy porusza się po łuku, co można traktować jako ruch postępowy po zakrzywionej trajektorii.
Real-World Examples and Data
Analiza ruchu postępowego i obrotowego jest kluczowa w wielu dziedzinach inżynierii. W robotyce, projektowanie efektywnych manipulatorów wymaga precyzyjnego sterowania zarówno ruchem postępowym, jak i obrotowym. W inżynierii samochodowej, optymalizacja zawieszenia i układu napędowego zależy od zrozumienia, jak siły i momenty działają na poszczególne elementy pojazdu podczas różnych manewrów.
Na przykład, analiza toczenia się opony samochodowej pokazuje, że współczynnik tarcia tocznego ma istotny wpływ na efektywność energetyczną pojazdu. Firmy oponiarskie przeprowadzają liczne testy, aby zmierzyć ten współczynnik dla różnych typów opon i w różnych warunkach. Dane te są wykorzystywane do projektowania opon, które oferują niski opór toczenia i jednocześnie zapewniają dobrą przyczepność.
W sporcie, biomechanika analizuje ruch sportowców w celu optymalizacji techniki i zapobiegania kontuzjom. Na przykład, analiza ruchu obrotowego podczas rzutu oszczepem pozwala na identyfikację błędów technicznych i poprawę efektywności rzutu. Dane zbierane za pomocą systemów motion capture i platform siłowych są wykorzystywane do tworzenia modeli matematycznych ruchu, które pomagają trenerom w projektowaniu treningów.
Conclusion
Zrozumienie ruchu postępowego i obrotowego bryły sztywnej jest niezbędne do analizy i projektowania wielu systemów inżynierskich i fizycznych. Te dwa rodzaje ruchu, choć różne, często występują jednocześnie i oddziałują ze sobą. Wykorzystanie zasad dynamiki Newtona, w połączeniu z pojęciami momentu bezwładności i momentu siły, pozwala na precyzyjne przewidywanie i sterowanie ruchem ciał stałych.
Zachęcamy do dalszego zgłębiania tematu dynamiki bryły sztywnej, eksplorowania bardziej zaawansowanych koncepcji, takich jak ruch precesyjny i nutacyjny, oraz eksperymentowania z symulacjami komputerowymi, które pozwalają na wizualizację i analizę skomplikowanych ruchów.