Una transformación lineal es una función entre dos espacios vectoriales que preserva las operaciones de suma vectorial y multiplicación por un escalar. Formalmente, sea V y W dos espacios vectoriales sobre un campo F. Una función T: V → W es una transformación lineal si para todos los vectores u, v en V y todo escalar c en F, se cumplen las siguientes dos propiedades:
T(u + v) = T(u) + T(v) (Aditividad)
T(cu) = cT(u) (Homogeneidad)
En esencia, esto significa que el resultado de aplicar la transformación a una suma de vectores es igual a la suma de las transformaciones de cada vector individual. De igual forma, el resultado de aplicar la transformación a un vector multiplicado por un escalar es igual a multiplicar la transformación del vector por el mismo escalar.
Un aspecto clave es el núcleo (kernel) de una transformación lineal T, denotado como ker(T). El núcleo es el conjunto de todos los vectores en V que se transforman en el vector cero en W: ker(T) = {v ∈ V | T(v) = 0}. El núcleo siempre es un subespacio de V.
Must Read
La imagen (image) de una transformación lineal T, denotada como im(T), es el conjunto de todos los vectores en W que son el resultado de aplicar T a algún vector en V: im(T) = {w ∈ W | ∃ v ∈ V tal que T(v) = w}. La imagen siempre es un subespacio de W.
El rango de T es la dimensión de la imagen de T, y la nulidad de T es la dimensión del núcleo de T. Un teorema fundamental relaciona estos conceptos: dim(V) = rango(T) + nulidad(T).
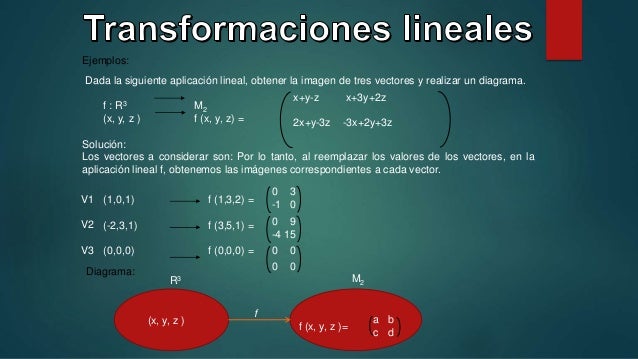
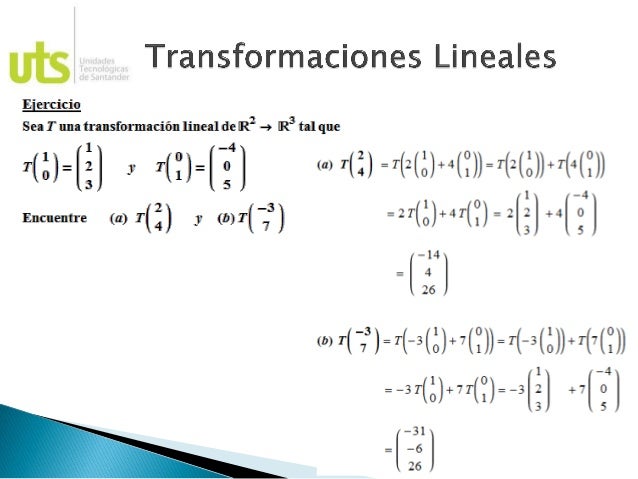
Ejemplo 1: La transformación T: R2 → R2 definida por T(x, y) = (x + y, x - y) es una transformación lineal. Se puede verificar que cumple las propiedades de aditividad y homogeneidad.
Ejemplo 2: La transformación T: R2 → R definida por T(x, y) = x2 + y2 no es una transformación lineal porque no cumple la propiedad de homogeneidad (T(c(x, y)) ≠ cT(x, y)).
Las transformaciones lineales son fundamentales en muchas áreas. En gráficos por computadora, las transformaciones lineales (rotación, escalamiento, traslación) se utilizan para manipular objetos en la pantalla. También son cruciales en el procesamiento de señales, la resolución de sistemas de ecuaciones lineales y en la teoría de control.



![Algebra de Transformaciones Lineales - [PDF Document]](https://static.fdocuments.ec/doc/1200x630/55cf94b7550346f57ba3f240/algebra-de-transformaciones-lineales.jpg?t=1687030313)


