
¿Qué es la Representación Matricial de una Transformación Lineal? Es simplemente una forma de expresar una transformación lineal (una función que preserva las operaciones de suma y multiplicación escalar) usando una matriz. Esto facilita muchísimo los cálculos y la comprensión.
Paso 1: Entender las Transformaciones Lineales
Primero, recordemos qué es una transformación lineal. Imagina una función que toma un vector como entrada y produce otro vector como salida. Para ser lineal, debe cumplir dos condiciones:
- Aditividad: T(u + v) = T(u) + T(v) (Transforma la suma de vectores como la suma de las transformaciones).
- Homogeneidad: T(cu) = cT(u) (Transforma un vector multiplicado por un escalar como el escalar multiplicado por la transformación del vector).
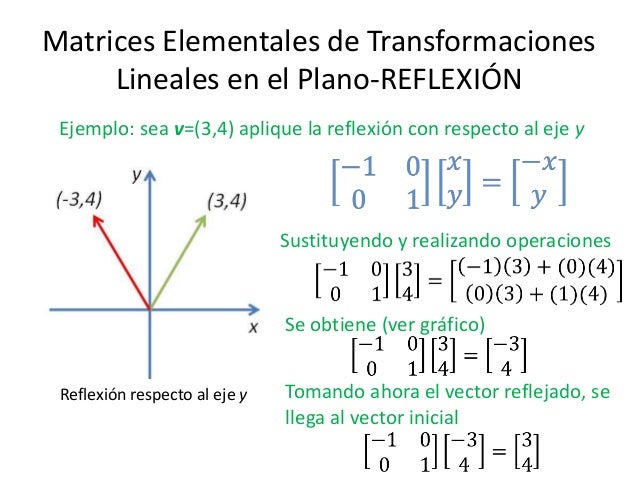
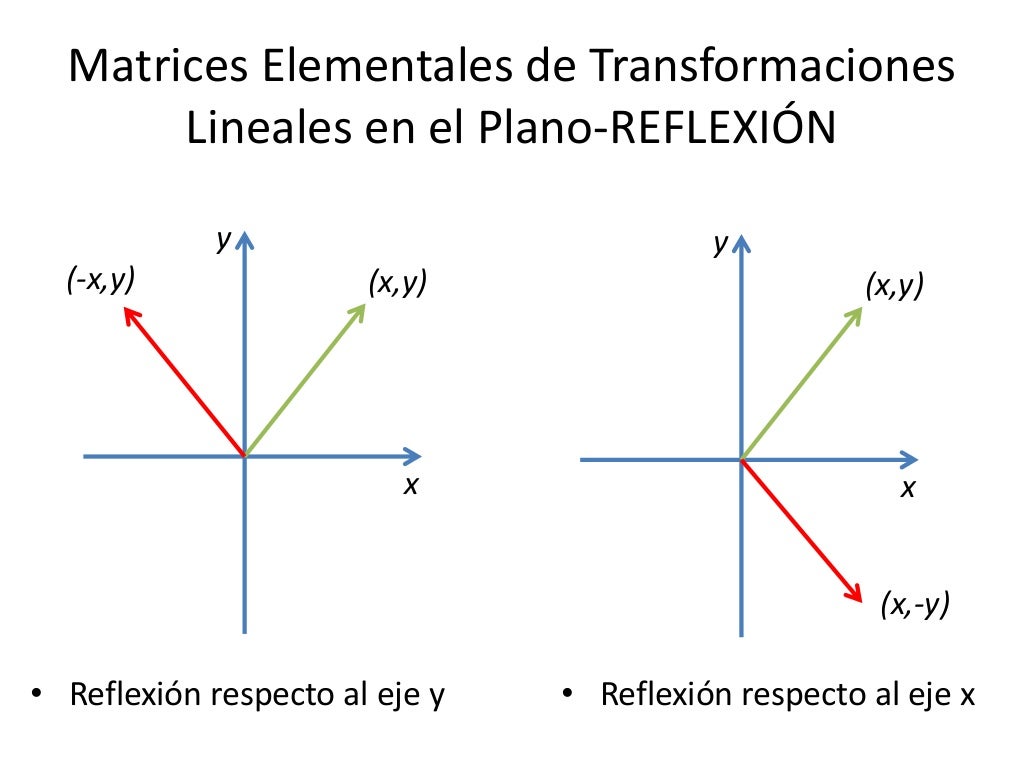
Ejemplos: rotaciones, reflexiones, proyecciones y escalamientos son transformaciones lineales.
Must Read
Paso 2: Bases y Vectores Coordenados
Para representar una transformación lineal con una matriz, necesitamos bases. Una base de un espacio vectorial es un conjunto de vectores linealmente independientes que pueden generar cualquier otro vector en ese espacio. Por ejemplo, en ℝ², la base estándar es {(1, 0), (0, 1)}.
Un vector coordenado describe un vector en términos de una base específica. Si v = 3(1, 0) + 2(0, 1) en la base estándar, su vector coordenado es (3, 2).

Paso 3: La Matriz de Transformación
Aquí viene la clave. Para encontrar la matriz de transformación A, aplicamos la transformación lineal T a cada vector de la base del espacio de entrada. Luego, expresamos cada resultado como un vector coordenado en la base del espacio de salida. Estos vectores coordenados forman las columnas de la matriz A.
Ejemplo: Sea T una transformación lineal de ℝ² a ℝ² definida como T(x, y) = (x + y, x - y). Usamos la base estándar {(1, 0), (0, 1)}.
- T(1, 0) = (1, 1). Su vector coordenado en la base estándar es (1, 1).
- T(0, 1) = (1, -1). Su vector coordenado en la base estándar es (1, -1).
Por lo tanto, la matriz de transformación A es:
[ 1 1 ]
[ 1 -1 ]
Paso 4: Aplicando la Transformación Matricial
Una vez que tenemos la matriz A, podemos aplicar la transformación a cualquier vector v multiplicando la matriz A por el vector coordenado de v. El resultado será el vector coordenado de T(v) en la base del espacio de salida.
Siguiendo el ejemplo anterior, si queremos encontrar T(2, 3), primero escribimos (2, 3) como vector columna:
[ 2 ]
[ 3 ]
Luego, multiplicamos la matriz A por este vector:
[ 1 1 ] [ 2 ] = [ 5 ]
[ 1 -1 ] [ 3 ] = [-1 ]
Entonces, T(2, 3) = (5, -1). ¡Verifícalo manualmente: T(2, 3) = (2+3, 2-3) = (5, -1)!
En resumen
La representación matricial nos permite expresar transformaciones lineales de forma compacta y realizar cálculos de manera eficiente. Al entender las bases, los vectores coordenados, y cómo construir la matriz de transformación, podemos aplicar transformaciones lineales de manera sencilla usando multiplicación matricial. ¡Practica con diferentes transformaciones y bases para dominar el concepto!