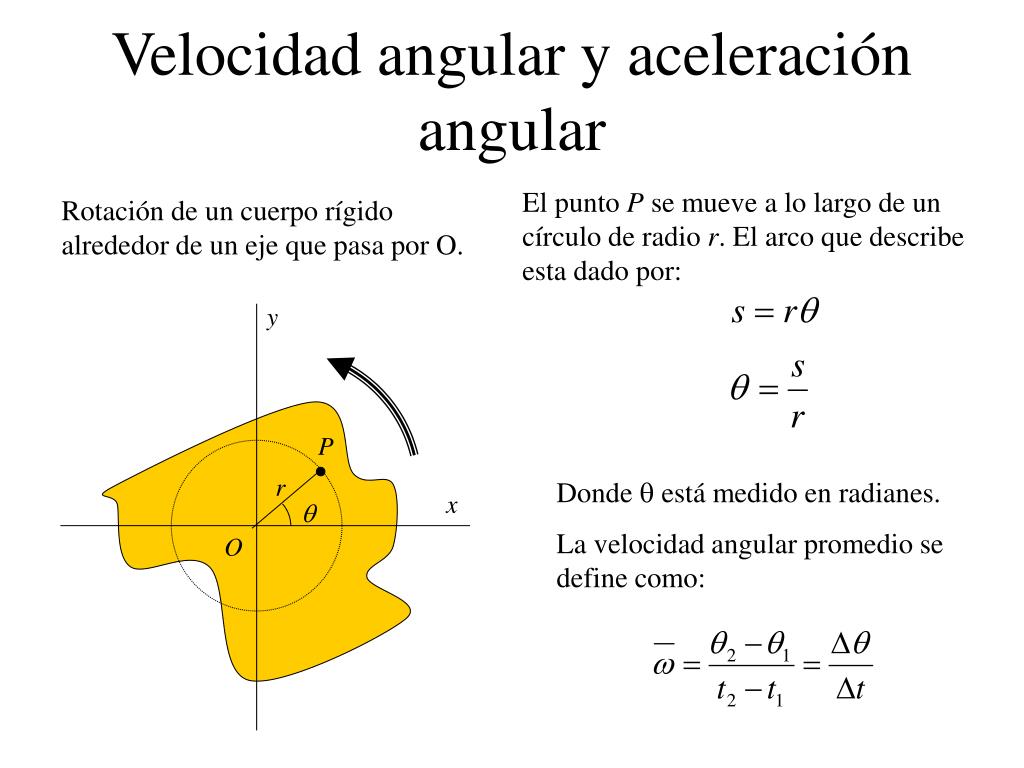
Analizar el movimiento angular de un cuerpo rígido en el plano implica entender cómo este cuerpo rota alrededor de un eje fijo o móvil. Se inicia identificando las fuerzas externas que actúan sobre el cuerpo. Estas fuerzas provocan torques que influyen en su movimiento rotacional.
Primero, se debe definir un sistema de coordenadas apropiado. Este sistema facilita la descripción de la posición angular y la velocidad angular del cuerpo. Es crucial identificar el eje de rotación. Asumimos que el cuerpo es rígido, lo que implica que la distancia entre dos puntos cualesquiera del cuerpo permanece constante.
Análisis de Fuerzas y Torques
El siguiente paso es determinar todas las fuerzas que actúan sobre el cuerpo. Se debe considerar la fuerza de gravedad. Tambien las fuerzas aplicadas externamente. Para cada fuerza, se calcula el torque con respecto al eje de rotación.
Must Read
El torque (τ) se calcula como el producto vectorial de la distancia (r) desde el eje de rotación hasta el punto de aplicación de la fuerza (F) y la fuerza misma. τ = r x F. El signo del torque indica la dirección de la rotación (horaria o antihoraria).
Se suman todos los torques para obtener el torque neto (τneto) que actúa sobre el cuerpo. τneto es la suma vectorial de todos los torques individuales. Este torque neto es directamente proporcional a la aceleración angular.

Aplicación de la Segunda Ley de Newton para la Rotación
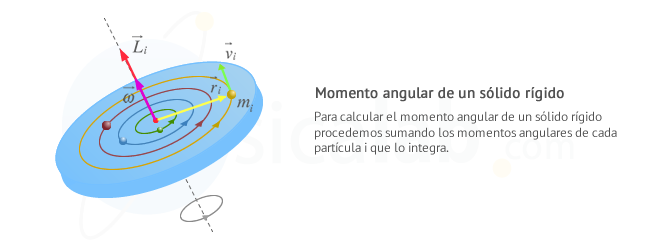
La segunda ley de Newton para la rotación establece que el torque neto es igual al momento de inercia (I) del cuerpo multiplicado por su aceleración angular (α). Es decir, τneto = Iα. El momento de inercia representa la resistencia del cuerpo a cambiar su estado de rotación.
I depende de la masa del cuerpo y de cómo está distribuida esta masa con respecto al eje de rotación. Para cuerpos con formas geométricas regulares, existen fórmulas para calcular I. Para cuerpos irregulares, se puede determinar experimentalmente o mediante cálculos más complejos.

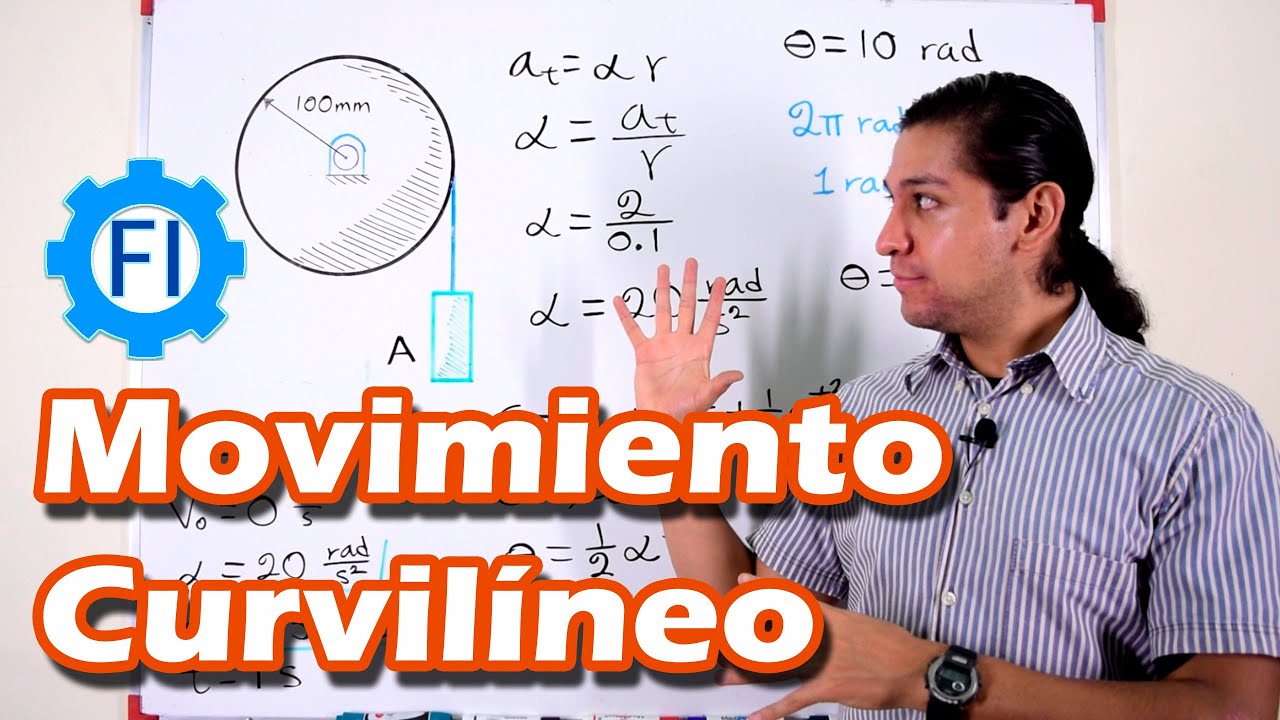
Conocido τneto e I, se puede calcular la aceleración angular α. Una vez calculada la aceleración angular, se puede utilizar para determinar la velocidad angular (ω) y la posición angular (θ) en función del tiempo.
Resolución del Problema: Cinemática Rotacional
La cinemática rotacional relaciona la posición angular, la velocidad angular y la aceleración angular. Si la aceleración angular es constante, se pueden usar las siguientes ecuaciones:
ω = ω0 + αt (Velocidad angular en función del tiempo). θ = θ0 + ω0t + (1/2)αt2 (Posición angular en función del tiempo). ω2 = ω02 + 2α(θ - θ0) (Relación entre velocidad angular y posición angular).
Si la aceleración angular no es constante, se deben utilizar integrales para determinar la velocidad y la posición angular. ω(t) = ∫ α(t) dt. θ(t) = ∫ ω(t) dt.

Consideraciones Adicionales y Casos Especiales
Es importante considerar las unidades de medida correctas. La posición angular se mide en radianes. La velocidad angular en radianes por segundo. La aceleración angular en radianes por segundo al cuadrado.
En algunos casos, puede ser necesario considerar la energía cinética rotacional. Krotacional = (1/2)Iω2. Esta energía puede ser útil para resolver problemas que involucran trabajo y energía.
Finalmente, es crucial verificar la solución obtenida. Asegurarse de que las unidades sean consistentes. Verificar que los resultados sean físicamente razonables. Un análisis dimensional puede ayudar a identificar errores en los cálculos.