
Para abordar la pregunta "¿Materiales Para Hacer Un Robot Araña?" de manera efectiva, sigue estos pasos.
Entendiendo el Problema
Primero, determina la escala del proyecto. ¿Es un robot araña pequeño, mediano o grande? Piensa en su función principal: ¿para qué se usará el robot?
Considera el entorno operativo. ¿Dónde operará: interior, exterior, o ambos? La complejidad del robot es otro factor clave.
Must Read
Recopilación de Información
Investiga diseños de robots araña existentes. Busca tutoriales, diagramas y ejemplos en línea. Analiza qué materiales se utilizan comúnmente.
Identifica los componentes esenciales. Necesitarás un microcontrolador, servomotores, una fuente de energía y una estructura física. Investiga proveedores locales o en línea.
Considera el presupuesto disponible. Algunos materiales son más caros que otros. Prioriza los componentes según su importancia y el presupuesto asignado.
Desarrollo de Soluciones Posibles
Estructura física: Explora opciones como aluminio, acrílico, plástico ABS (impresión 3D), o incluso materiales reciclados.
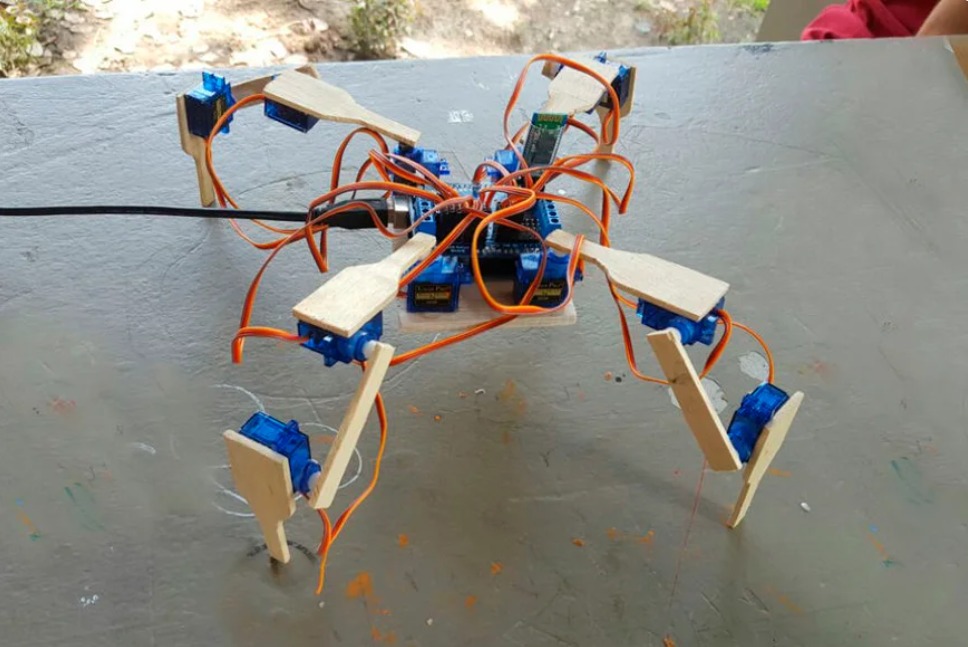
Sistema de movimiento: Los servomotores son comunes para controlar las patas. Calcula el torque necesario para mover el robot. Considera el número de servomotores necesarios por pata.
Control y programación: Un microcontrolador como Arduino o Raspberry Pi Pico puede controlar los servomotores. Elige el que mejor se adapte a tus habilidades de programación.
Fuente de energía: Baterías recargables como LiPo o NiMH son opciones comunes. Asegúrate de que la batería tenga suficiente voltaje y capacidad para alimentar todos los componentes.
Cables y conectores: Necesitarás cables para conectar todos los componentes. Utiliza conectores para facilitar el montaje y desmontaje.

Materiales Específicos Sugeridos
Estructura: Placas de acrílico cortadas a medida, perfiles de aluminio ligeros, o piezas impresas en 3D con ABS.
Servomotores: Servomotores estándar tipo SG90 (para robots pequeños) o servomotores más potentes para robots más grandes.
Microcontrolador: Arduino Uno o Nano (fáciles de programar) o ESP32 (con conectividad Wi-Fi/Bluetooth).
Batería: Batería LiPo de 7.4V o 11.1V con el cargador correspondiente.

Otros: Cables de conexión (jumpers), resistencias (si son necesarias), tornillos y tuercas para ensamblar la estructura.
Verificación de la Solución
Revisa la compatibilidad de los componentes. Asegúrate de que el microcontrolador pueda controlar los servomotores. Verifica que la fuente de energía tenga suficiente potencia.
Realiza un prototipo básico. Construye una pata y prueba el movimiento. Asegúrate de que el servomotor tenga suficiente torque.
Programa el microcontrolador para controlar los servomotores. Implementa un algoritmo básico de movimiento para las patas.

Evalúa el rendimiento del prototipo. Mide el consumo de energía. Identifica áreas de mejora en el diseño.
Itera sobre el diseño. Realiza cambios en los materiales o la programación según sea necesario. Prueba el robot en diferentes entornos.
Documenta el proceso. Toma notas sobre los materiales utilizados, los pasos de construcción y los desafíos encontrados. Esto te ayudará a mejorar el diseño en el futuro.
Recuerda que la seguridad es importante. Toma precauciones al trabajar con herramientas eléctricas y baterías. Supervisa el robot durante las pruebas.

