Encontrar el punto de intersección de dos rectas en el espacio tridimensional (R3) es un problema común en geometría y álgebra lineal. Aunque la idea es similar a encontrar la intersección de dos rectas en el plano (R2), la presencia de una tercera dimensión introduce algunas complejidades adicionales. Este artículo explica cómo abordar este problema paso a paso.
Representación de las Rectas
Primero, necesitamos entender cómo se representan las rectas en R3. Una recta en R3 se puede representar de varias maneras, pero la forma más útil para encontrar intersecciones es la forma paramétrica. La forma paramétrica de una recta se define mediante un punto en la recta y un vector director. Si tenemos un punto P0 = (x0, y0, z0) y un vector director v = (a, b, c), entonces cualquier punto P = (x, y, z) en la recta puede ser expresado como:
x = x0 + at
Must Read
y = y0 + bt
z = z0 + ct
Donde t es un parámetro real. Cada valor de t corresponde a un punto diferente en la recta.
Encontrando la Intersección
Supongamos que tenemos dos rectas, L1 y L2, definidas por:

L1: x = x1 + a1t, y = y1 + b1t, z = z1 + c1t
L2: x = x2 + a2s, y = y2 + b2s, z = z2 + c2s
Donde (x1, y1, z1) y (x2, y2, z2) son puntos en las rectas L1 y L2, respectivamente, y (a1, b1, c1) y (a2, b2, c2) son sus vectores directores. Observa que hemos usado diferentes parámetros, t y s, para cada recta. Esto es crucial porque la intersección, si existe, puede ocurrir en diferentes valores de estos parámetros.
Para encontrar el punto de intersección, necesitamos encontrar valores de t y s que hagan que las coordenadas x, y, y z de ambas rectas sean iguales. Esto nos da el siguiente sistema de ecuaciones:
x1 + a1t = x2 + a2s
y1 + b1t = y2 + b2s
z1 + c1t = z2 + c2s
Tenemos tres ecuaciones con dos incógnitas (t y s). Normalmente, resolvemos las dos primeras ecuaciones para t y s, y luego sustituimos estos valores en la tercera ecuación. Si la tercera ecuación se cumple, entonces las rectas se intersectan. Si no se cumple, las rectas no se intersectan y son alabeadas.
Casos Posibles
Al resolver el sistema de ecuaciones, pueden ocurrir tres situaciones:

- Existe una solución única para t y s: Esto significa que las rectas se intersectan en un único punto. Sustituye el valor de t en la ecuación de L1 (o el valor de s en la ecuación de L2) para encontrar las coordenadas del punto de intersección.
- No existe una solución: Esto puede suceder por dos razones: Las rectas son paralelas y no se intersectan, o las rectas son alabeadas (no son paralelas ni se intersectan).
- Existen infinitas soluciones: Esto significa que las dos ecuaciones representan la misma recta (o segmentos de la misma recta).
Ejemplo
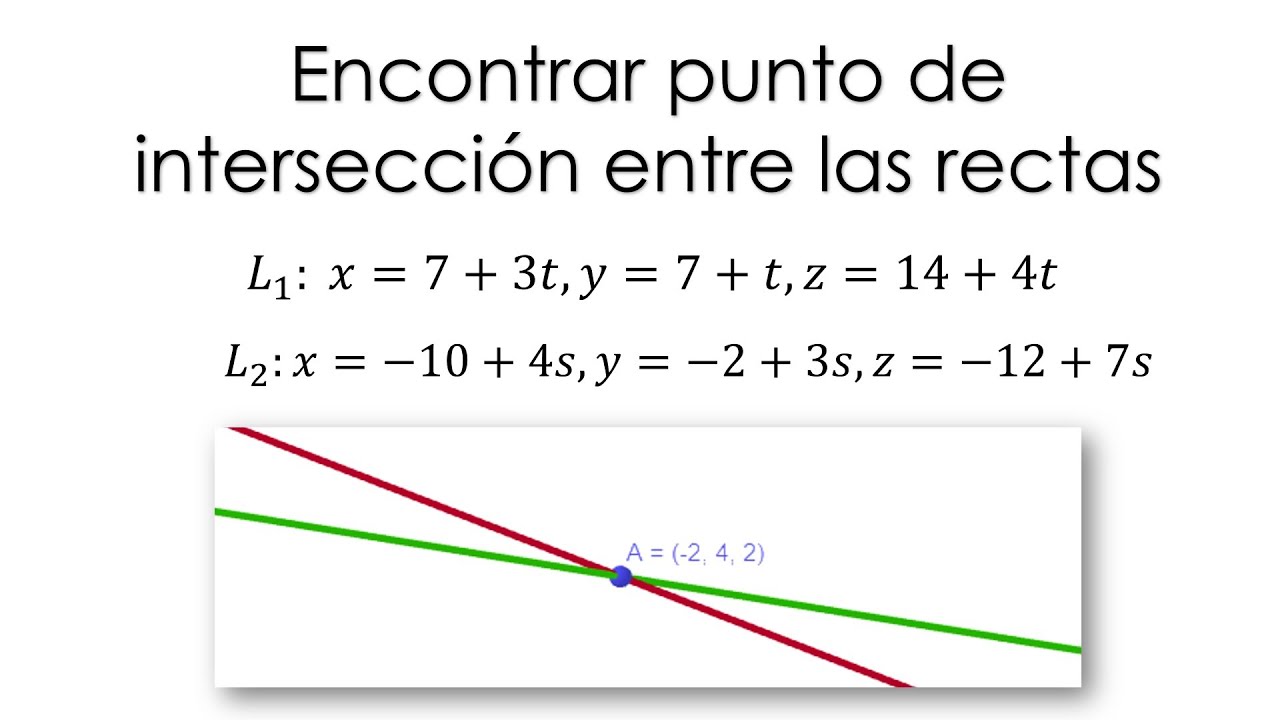
Considera las siguientes rectas:
L1: x = 1 + t, y = 2 - t, z = 3 + 2t
L2: x = 2s, y = 3 + s, z = -1 + 4s
Igualamos las coordenadas:
1 + t = 2s

2 - t = 3 + s
3 + 2t = -1 + 4s
Resolviendo las dos primeras ecuaciones, obtenemos t = -2 y s = -1/2. Sustituyendo estos valores en la tercera ecuación: 3 + 2(-2) = -1 + 4(-1/2) => -1 = -3. Esto es falso, así que las rectas no se intersectan y son alabeadas.
Aplicaciones Prácticas
Encontrar la intersección de rectas en R3 tiene muchas aplicaciones en campos como la gráfica por computadora, la robótica y la física. Por ejemplo, en la gráfica por computadora, se utiliza para detectar colisiones entre objetos. En la robótica, se utiliza para planificar trayectorias para los robots evitando obstáculos. En física, se utiliza para calcular la trayectoria de partículas.
La capacidad de determinar si las líneas se cruzan en un espacio 3D es una habilidad fundamental para comprender mejor la geometría y sus aplicaciones en el mundo real.