En este artículo, exploraremos ejercicios resueltos de rectas en R3. Profundizaremos en los conceptos clave y proporcionaremos ejemplos claros. ¡Comencemos!
Definiciones Fundamentales
Una recta en el espacio tridimensional (R3) se define como el conjunto de todos los puntos que satisfacen una ecuación vectorial, paramétrica o simétrica. Estas representaciones nos permiten describir la posición y dirección de la recta de manera precisa.
El vector director de una recta es un vector que indica la dirección en la que se extiende la recta. Es crucial para definir la orientación de la recta en el espacio. Podemos obtenerlo a partir de dos puntos de la recta.
Must Read
El punto de paso es un punto conocido que pertenece a la recta. Junto con el vector director, define completamente la recta.
Ecuaciones de la Recta en R3
Existen varias formas de representar una recta en R3.
Ecuación Vectorial
La ecuación vectorial de una recta es: r = p + tv, donde:
- r es el vector de posición de cualquier punto en la recta.
- p es el vector de posición de un punto conocido en la recta (punto de paso).
- v es el vector director de la recta.
- t es un parámetro escalar que varía a lo largo de la recta.
Esta ecuación indica que cualquier punto en la recta se puede alcanzar sumando un múltiplo escalar del vector director al punto de paso.
Ecuaciones Paramétricas
Las ecuaciones paramétricas se derivan de la ecuación vectorial. Si r = (x, y, z), p = (x₀, y₀, z₀), y v = (a, b, c), entonces las ecuaciones paramétricas son:
- x = x₀ + ta
- y = y₀ + tb
- z = z₀ + tc
Cada ecuación representa una coordenada en función del parámetro t. Estas ecuaciones son muy útiles para encontrar puntos específicos en la recta.
Ecuaciones Simétricas
Las ecuaciones simétricas se obtienen despejando t de cada ecuación paramétrica e igualando los resultados:
(x - x₀) / a = (y - y₀) / b = (z - z₀) / c, siempre que a, b, y c sean diferentes de cero.

Si alguno de los componentes del vector director es cero, la ecuación correspondiente se escribe de forma diferente. Por ejemplo, si a = 0, entonces x = x₀.
Ejercicios Resueltos
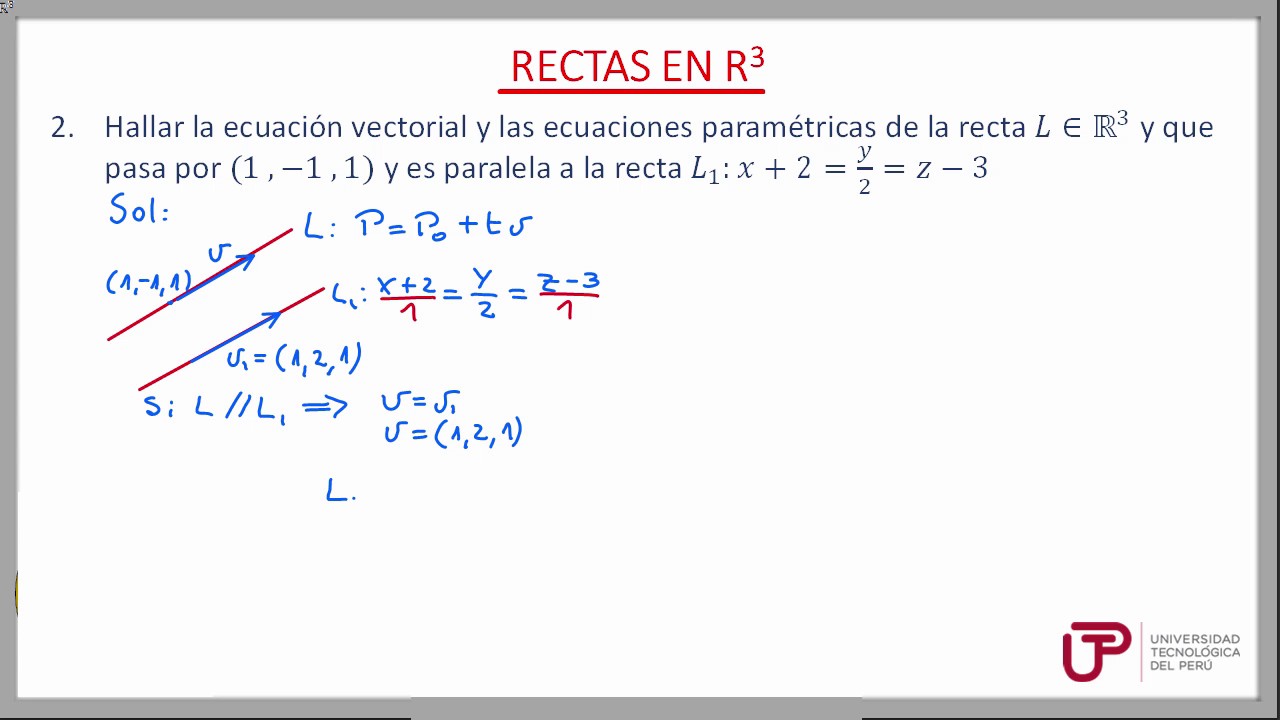
Ejercicio 1: Hallar la ecuación vectorial de la recta que pasa por el punto (1, 2, 3) y tiene vector director (4, 5, 6).
Solución: Usando la ecuación vectorial r = p + tv, tenemos r = (1, 2, 3) + t(4, 5, 6).
Ejercicio 2: Hallar las ecuaciones paramétricas de la recta que pasa por los puntos A(1, 0, -1) y B(2, 1, 1).

Solución: Primero, encontramos el vector director: v = B - A = (2-1, 1-0, 1-(-1)) = (1, 1, 2). Luego, usamos el punto A (1, 0, -1) y el vector director (1, 1, 2) para obtener las ecuaciones paramétricas: x = 1 + t, y = t, z = -1 + 2t.
Ejercicio 3: Hallar las ecuaciones simétricas de la recta con ecuaciones paramétricas x = 2 + t, y = 3 - 2t, z = 1 + 3t.
Solución: Despejamos t de cada ecuación: t = x - 2, t = (3 - y) / 2, t = (z - 1) / 3. Igualando, obtenemos las ecuaciones simétricas: (x - 2) / 1 = (3 - y) / 2 = (z - 1) / 3.
Aplicaciones en la Vida Real
Las rectas en R3 tienen muchas aplicaciones en la vida real.

En ingeniería, se utilizan para modelar la trayectoria de un objeto en el espacio. Por ejemplo, la trayectoria de un misil o la ruta de un avión.
En gráficos por computadora, las rectas se utilizan para dibujar líneas y formas tridimensionales. Son la base para la creación de modelos 3D y animaciones.
En navegación, se utilizan para determinar la dirección y distancia entre dos puntos. El GPS utiliza conceptos similares para determinar la posición.
Espero que este artículo te haya ayudado a comprender mejor las rectas en R3. ¡Practica con más ejercicios para dominar el tema!

