La representación en espacio de estados es una forma de modelar sistemas dinámicos utilizando un conjunto de ecuaciones diferenciales de primer orden. En lugar de utilizar una sola ecuación diferencial de orden superior (como en la función de transferencia), se describe el sistema mediante un vector de variables de estado que evolucionan en el tiempo.
La función de transferencia, por otro lado, es una representación matemática que describe la relación entre la entrada y la salida de un sistema en el dominio de Laplace. Es una representación entrada-salida, sin información interna del sistema.
Conversión de Función de Transferencia a Espacio de Estados: El objetivo es encontrar una representación en espacio de estados (ecuaciones de estado y de salida) que genere la misma relación entrada-salida que la función de transferencia dada. Existen múltiples formas de hacerlo, no es una transformación única.
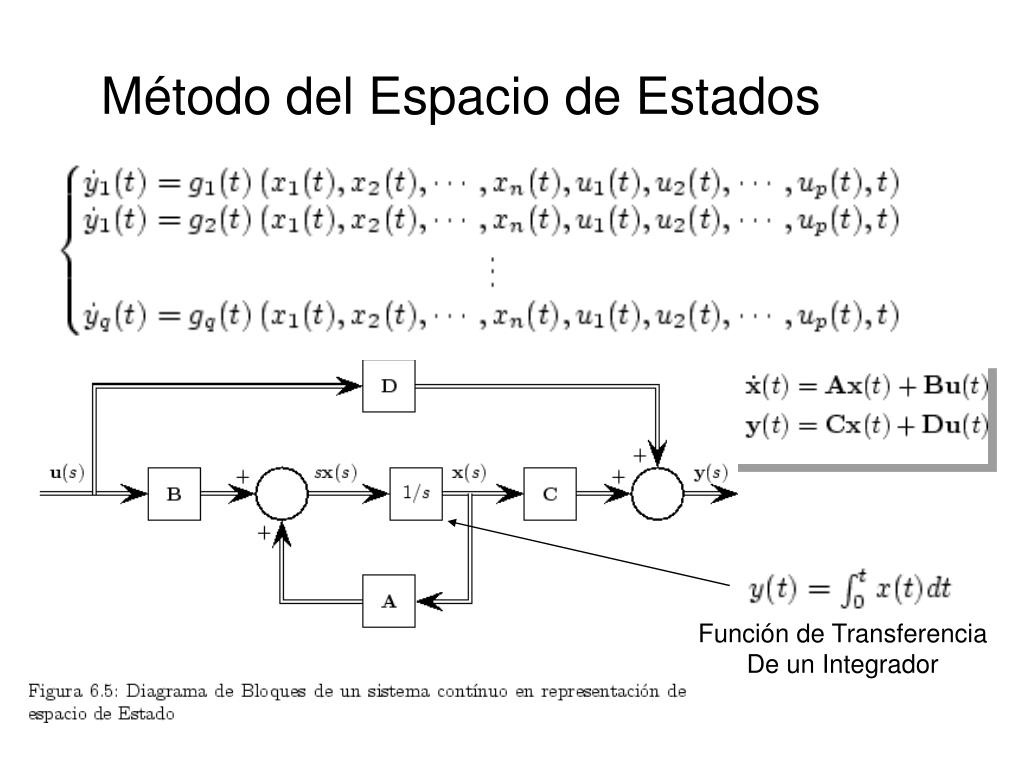
Ecuaciones del Espacio de Estados: La representación en espacio de estados consta de dos ecuaciones principales:
Ecuación de Estado: ẋ(t) = Ax(t) + Bu(t) Ecuación de Salida: y(t) = Cx(t) + Du(t)
Análisis básico de sistemas de control. Ecuaciones de espacio – estado
Donde:
x(t) es el vector de estado.
u(t) es la entrada del sistema.
y(t) es la salida del sistema.
A es la matriz de estado.
B es la matriz de entrada.
C es la matriz de salida.
D es la matriz de transmisión directa.
Pasos Generales para la Conversión: Primero, se identifica el orden de la función de transferencia. Luego, se eligen las variables de estado de manera adecuada (generalmente derivadas sucesivas de la salida). Finalmente, se determinan las matrices A, B, C y D que satisfacen las ecuaciones del espacio de estados.
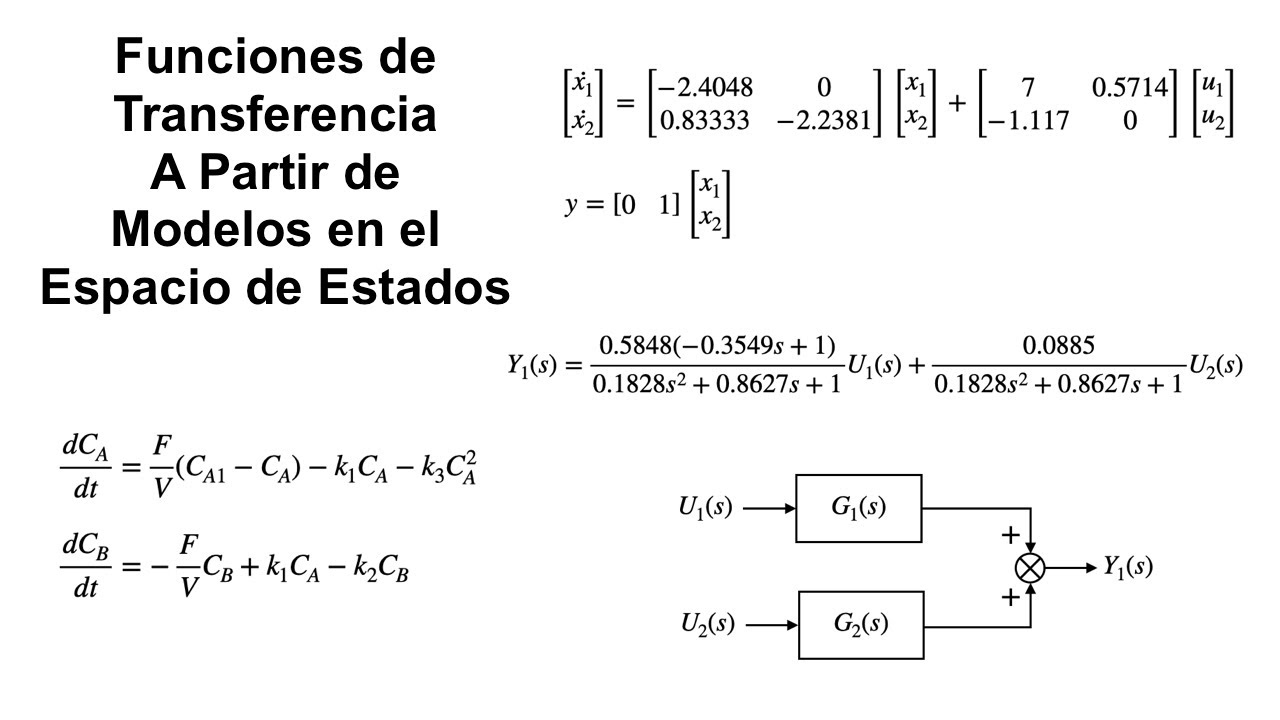
FUNCIÓN DE TRANSFERENCIA A PARTIR DE REPRESENTACIÓN ESPACIO DE ESTADOS
Ejemplo Sencillo: Consideremos la función de transferencia G(s) = 1 / (s+2). Una posible representación en espacio de estados sería: A = -2, B = 1, C = 1, D = 0. La ecuación de estado es ẋ = -2x + u, y la ecuación de salida es y = x.
Segundo Ejemplo: Para G(s) = (s+1)/(s^2 + 3s + 2), se pueden elegir variables de estado como x1 = y, x2 = ẏ. La obtención de las matrices A, B, C, y D requiere más álgebra, pero sigue el mismo principio de derivar las ecuaciones de estado y salida a partir de la función de transferencia.
Aplicaciones Prácticas: La representación en espacio de estados es fundamental en el diseño de controladores avanzados (como el control óptimo o el control predictivo) ya que permite modelar sistemas complejos con múltiples entradas y salidas, y facilita el análisis de la estabilidad y el rendimiento del sistema. Se utiliza ampliamente en ingeniería aeroespacial, robótica, control de procesos y muchas otras áreas.