El ángulo exterior de un polígono es el ángulo formado por un lado del polígono y la extensión del lado adyacente. Es crucial entender que se mide en la parte exterior de la figura, complementando el ángulo interior correspondiente.
Para calcular el ángulo exterior, primero necesitas entender que la suma de todos los ángulos exteriores de cualquier polígono convexo (independientemente del número de lados) siempre es de 360 grados. Esta es una propiedad fundamental.
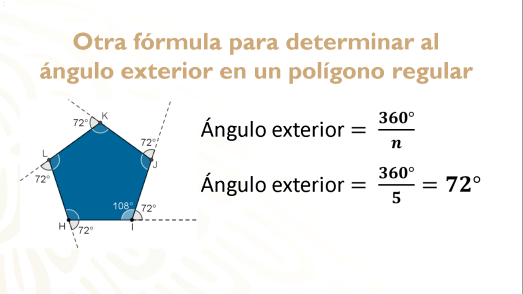
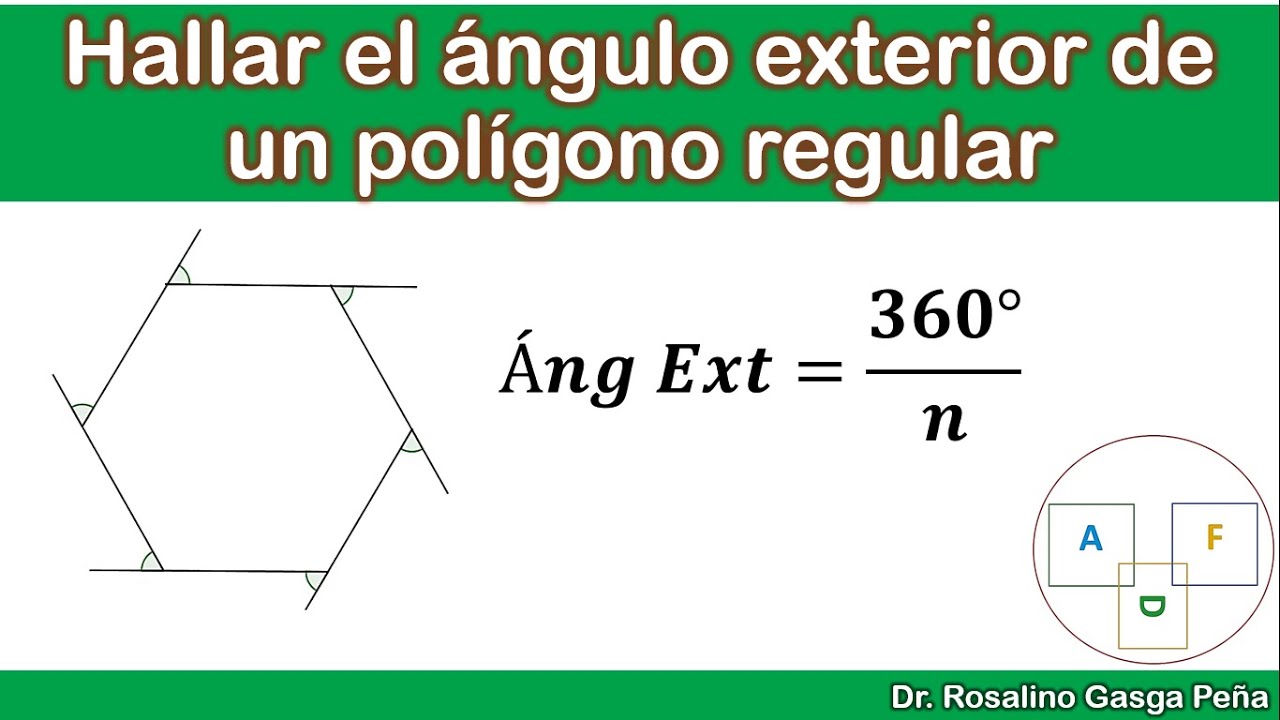
Si el polígono es regular (todos sus lados y ángulos son iguales), el cálculo es sencillo. Divide 360 grados por el número de lados (o ángulos) del polígono. La fórmula es: Ángulo Exterior = 360° / n, donde 'n' es el número de lados.
Must Read
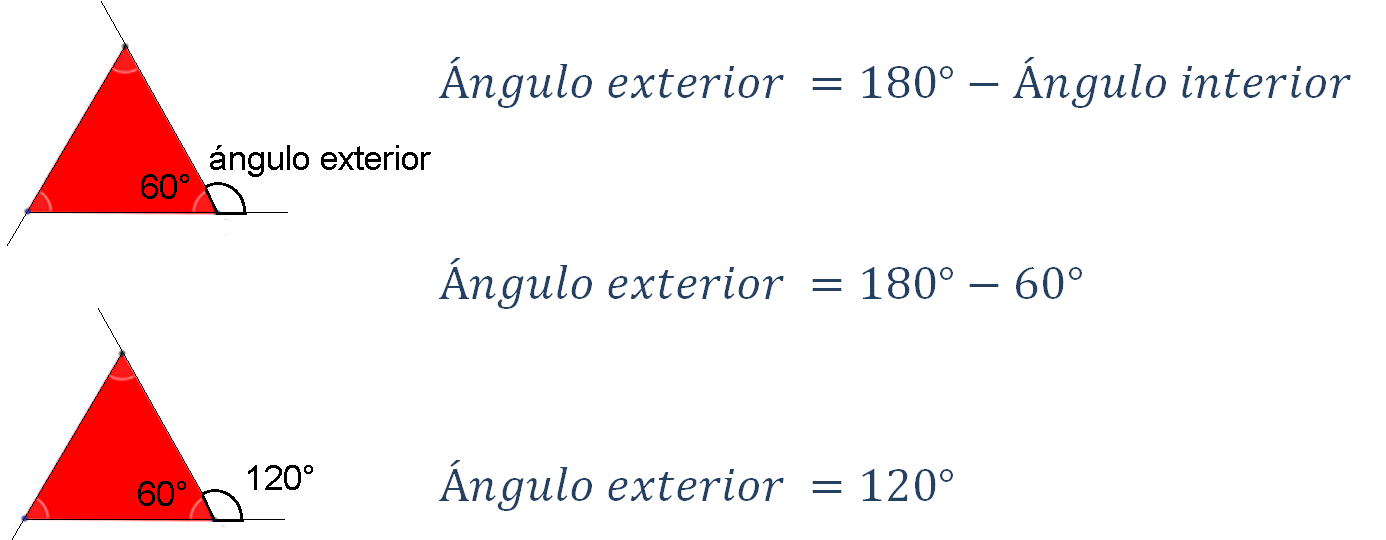
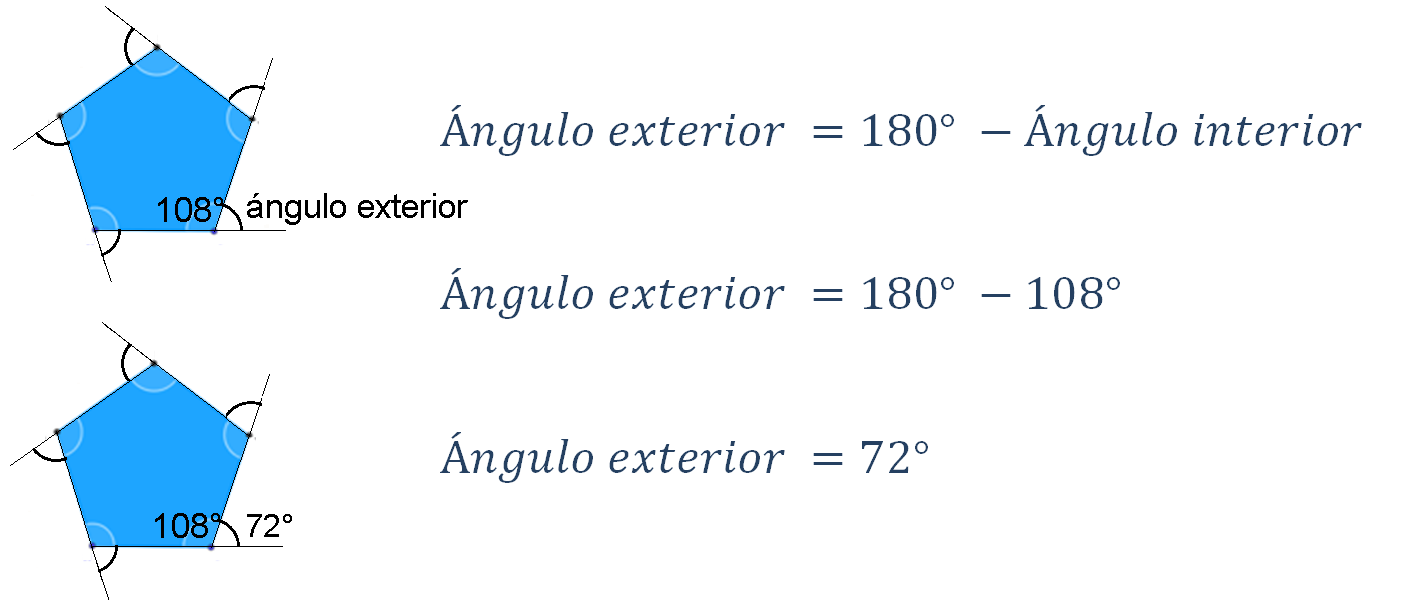
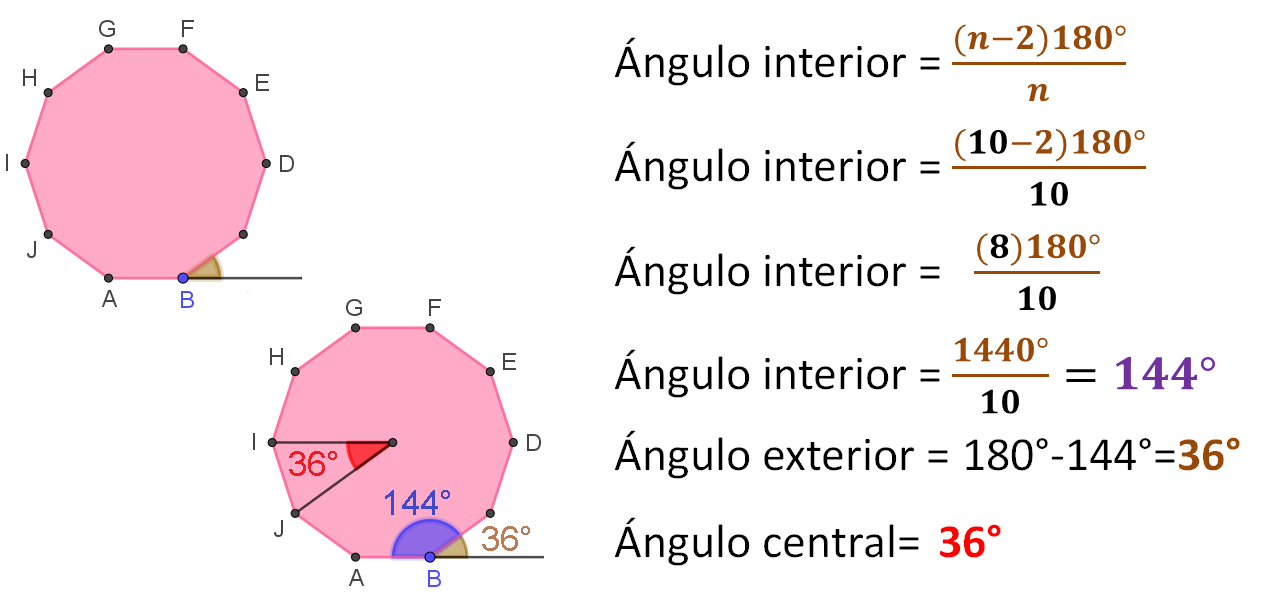
En el caso de un polígono irregular, donde los lados y ángulos son diferentes, cada ángulo exterior individual se calcula restando el ángulo interior correspondiente a 180 grados. Es decir, Ángulo Exterior = 180° - Ángulo Interior. Este método requiere que conozcas el valor de cada ángulo interior para determinar su respectivo ángulo exterior.
Ejemplo 1: Un hexágono regular tiene 6 lados. Por lo tanto, su ángulo exterior se calcula como: 360° / 6 = 60°. Cada ángulo exterior del hexágono regular mide 60 grados.

Ejemplo 2: Si un ángulo interior de un polígono irregular mide 120°, su ángulo exterior correspondiente se calcula como: 180° - 120° = 60°.
Es importante destacar la relación entre los ángulos interiores y exteriores. Un ángulo interior y su ángulo exterior adyacente siempre suman 180 grados; son ángulos suplementarios. Comprender esta relación simplifica el cálculo de ambos.

En resumen, recuerda: para polígonos regulares, divide 360° por el número de lados. Para polígonos irregulares, resta el ángulo interior de 180°.
El conocimiento de los ángulos exteriores tiene aplicaciones prácticas en diversos campos. Por ejemplo, en arquitectura e ingeniería civil, se utilizan para diseñar estructuras y calcular ángulos de inclinación en techos y rampas. También son útiles en la robótica para programar movimientos precisos de robots en diversas direcciones.