Un robot seguidor de línea con Arduino es un dispositivo autónomo diseñado para seguir una línea predefinida, generalmente una línea negra sobre una superficie blanca o viceversa. Su funcionamiento se basa en la detección de la línea mediante sensores, que transmiten información al microcontrolador Arduino para controlar los motores que impulsan el robot.
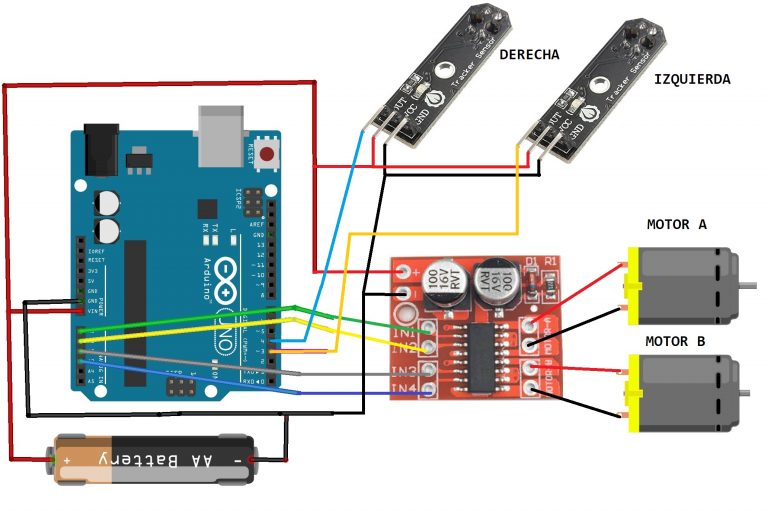
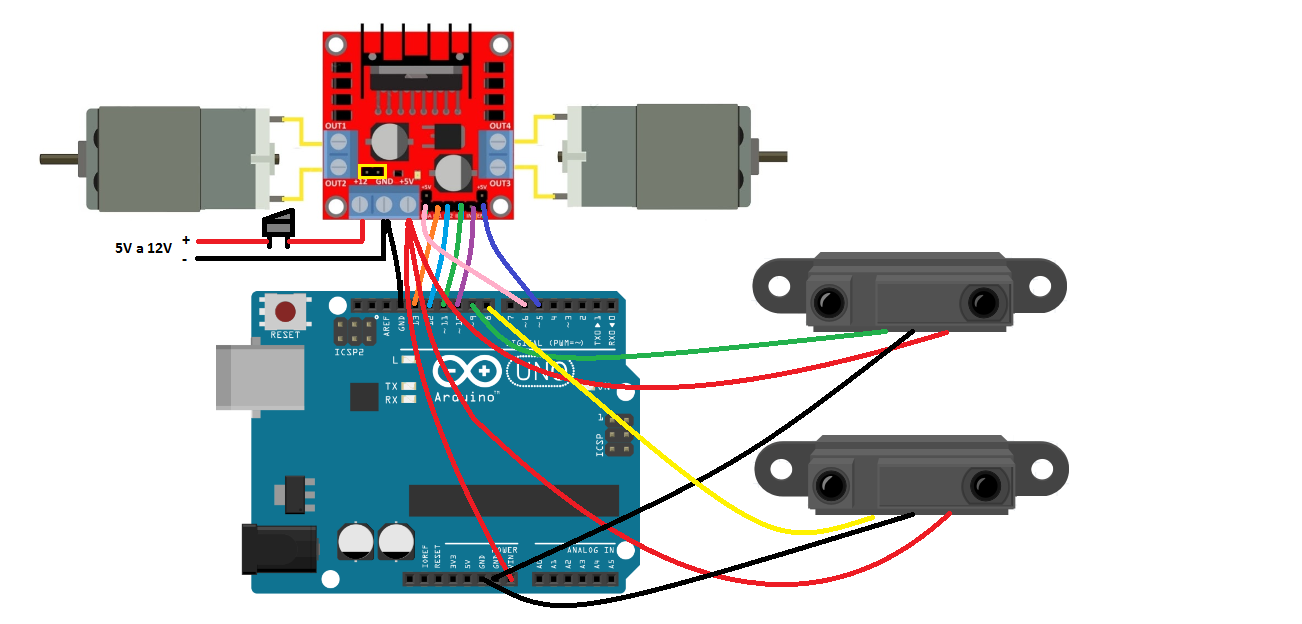
El aspecto clave reside en la utilización de sensores infrarrojos (IR) reflectivos. Estos sensores emiten luz infrarroja y miden la cantidad de luz que se refleja de vuelta. La superficie blanca refleja más luz que la negra, lo que permite al sensor distinguir entre ambas. Normalmente se utilizan dos o más sensores colocados uno al lado del otro para detectar la posición de la línea.
El microcontrolador Arduino actúa como el cerebro del robot. Recibe las señales de los sensores, las procesa y, en función de la posición de la línea, envía comandos a los motores. La programación del Arduino implica la creación de un algoritmo que determine la velocidad y dirección de cada motor.
Must Read
La lógica de control es fundamental. Si el sensor de la izquierda detecta la línea, el robot debe girar ligeramente hacia la derecha. Si el sensor de la derecha detecta la línea, debe girar ligeramente hacia la izquierda. Si ambos sensores detectan la línea, el robot debe seguir recto. Si ninguno de los sensores detecta la línea, el robot puede detenerse o continuar en la dirección anterior (dependiendo del algoritmo).
Ejemplo simple: Imagina que solo tienes dos sensores. Si el sensor izquierdo (S1) está sobre la línea (valor ALTO) y el sensor derecho (S2) no (valor BAJO), entonces giras hacia la derecha reduciendo la velocidad del motor izquierdo y/o aumentando la velocidad del motor derecho. El caso contrario (S1 BAJO, S2 ALTO) implicaría un giro a la izquierda.

Otro ejemplo: Podrías usar modulación por ancho de pulsos (PWM) para controlar la velocidad de los motores. Si el error (la distancia del robot a la línea) es grande, aumentas la velocidad del motor de corrección proporcionalmente.
Es crucial la calibración de los sensores. Los valores de luz reflejada pueden variar según la iluminación ambiental y las características de la superficie. Es necesario calibrar los sensores para obtener una lectura precisa y fiable.
La elección de los motores también es importante. Se suelen utilizar motores de corriente continua (DC) con reductores para obtener un buen par motor y controlar la velocidad con precisión.
En el mundo real, los robots seguidores de línea se utilizan en aplicaciones como el transporte automatizado de materiales en fábricas, la navegación de robots aspiradores y en competiciones robóticas. Son un excelente ejemplo práctico de la aplicación de la robótica y la programación embebida.