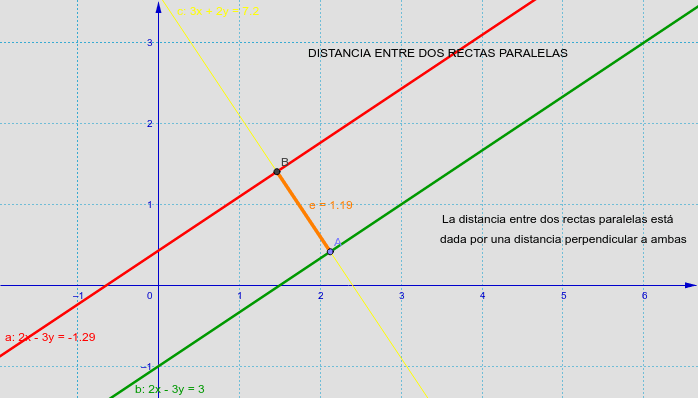
La calculadora de distancia entre dos rectas paralelas es una herramienta que permite determinar la distancia mínima que separa dos líneas rectas que mantienen una orientación idéntica y nunca se intersectan. Esta distancia siempre será perpendicular a ambas rectas.
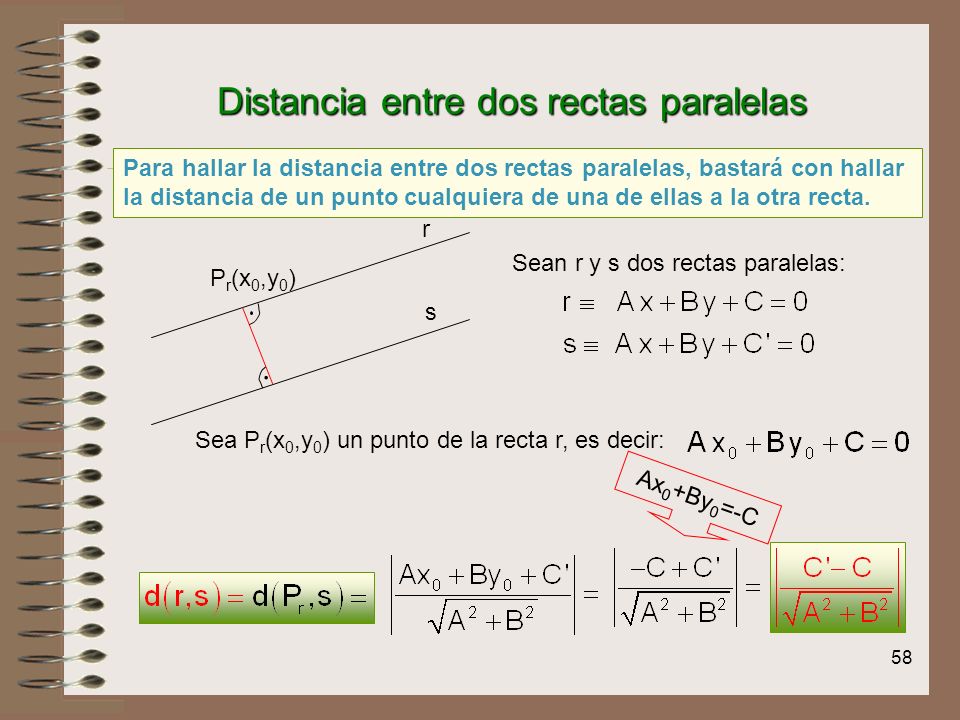
Para calcular la distancia, es fundamental comprender la ecuación general de una recta: Ax + By + C = 0. Dos rectas son paralelas si sus coeficientes A y B son proporcionales. Es decir, si tienes dos rectas: A1x + B1y + C1 = 0 y A2x + B2y + C2 = 0, serán paralelas si A1/A2 = B1/B2.
El principal método de cálculo implica transformar las ecuaciones a la forma general mencionada. Una vez que tienes las dos ecuaciones en esta forma, la distancia (d) entre ellas se calcula utilizando la siguiente fórmula:
Must Read
d = |C2 - C1| / √(A2 + B2)
Donde A y B son los coeficientes de x e y, respectivamente, que deben ser los mismos (o múltiplos) en ambas ecuaciones tras la debida normalización, y C1 y C2 son los términos independientes de cada ecuación.

Ejemplo 1: Calcula la distancia entre las rectas 2x + y - 3 = 0 y 2x + y - 7 = 0. Aquí, A = 2, B = 1, C1 = -3 y C2 = -7. Aplicando la fórmula: d = |-7 - (-3)| / √(22 + 12) = 4 / √5 ≈ 1.79.
Ejemplo 2: Calcula la distancia entre x + 2y = 4 y x + 2y = 10. Transformando: x + 2y - 4 = 0 y x + 2y - 10 = 0. Aquí, A = 1, B = 2, C1 = -4 y C2 = -10. Aplicando la fórmula: d = |-10 - (-4)| / √(12 + 22) = 6 / √5 ≈ 2.68.
Es importante normalizar las ecuaciones si los coeficientes A y B no son idénticos. Esto significa multiplicar una o ambas ecuaciones por una constante para que A y B sean iguales o múltiplos entre sí antes de aplicar la fórmula de la distancia. En caso de que los coeficientes no sean iguales, se debe realizar una normalización para garantizar la precisión del cálculo.
La aplicación práctica de este cálculo es vasta. En ingeniería civil, se utiliza para determinar la separación adecuada entre carriles de una carretera. En arquitectura, para el diseño de fachadas y estructuras paralelas. Y en robótica, para la planificación de trayectorias de robots que deben moverse paralelamente a un objeto o trayectoria.