
Analizar y resolver un problema de "Pista Para Robot Seguidor De Linea" requiere un enfoque metódico.
Entendiendo el Problema
Primero, debemos identificar claramente el objetivo. ¿Qué se espera que haga el robot? Se espera que siga una línea, usualmente contrastante con el fondo. Esta línea puede ser recta, curva, discontinua, o tener intersecciones. Imagina las posibles complejidades.
Se asume que el robot tiene sensores. Estos sensores detectan la línea. Generalmente son sensores infrarrojos o sensores de luz. El robot también debe tener actuadores. Estos actuadores, usualmente motores, permiten el movimiento. Se asume que el robot puede variar su velocidad y dirección.
Must Read
Análisis de la Pista
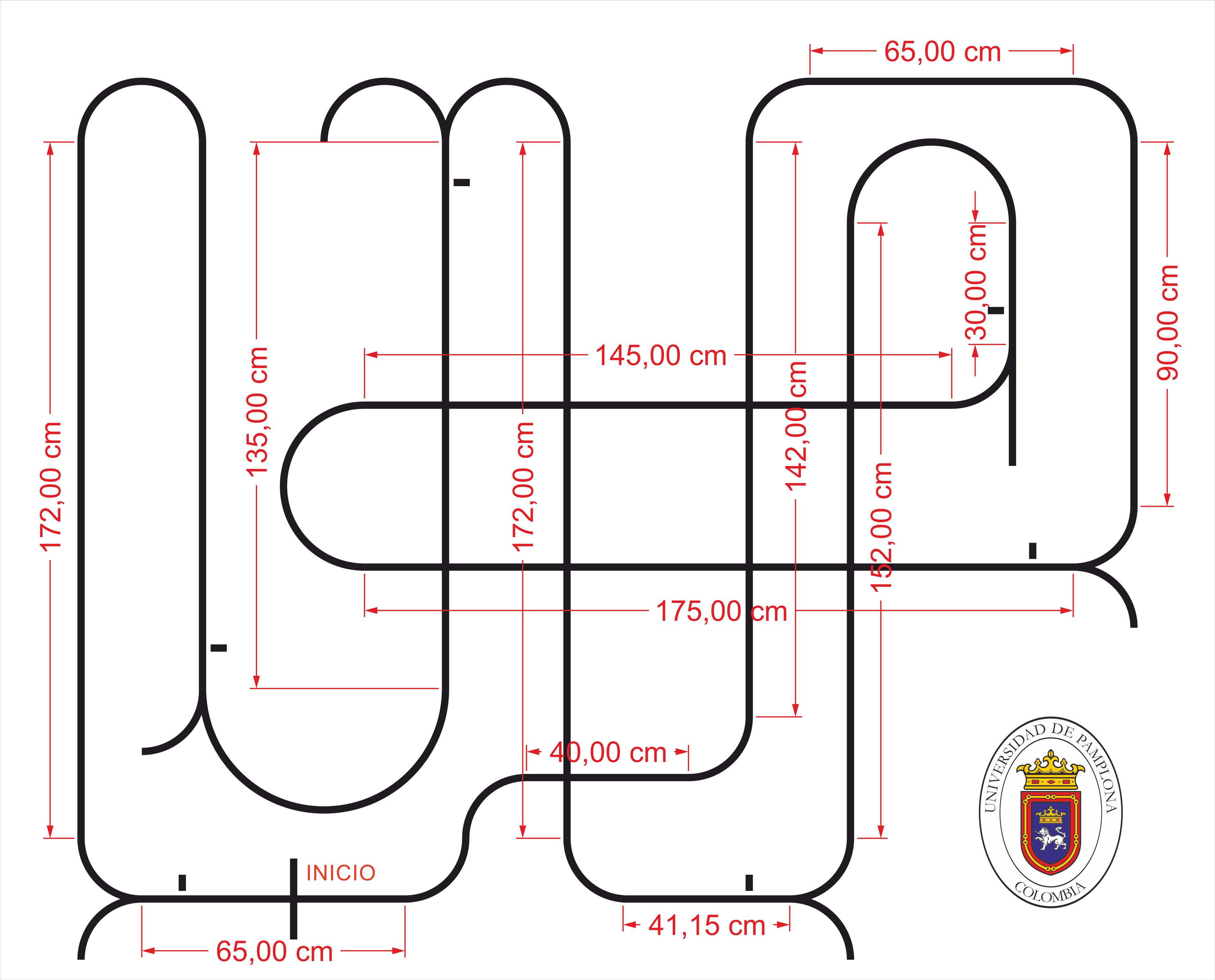
Es crucial examinar la pista detalladamente. ¿Qué tipo de línea tiene? ¿Es negra sobre blanco o blanca sobre negro? ¿Qué tan ancha es la línea? ¿Hay curvas pronunciadas? ¿Existen intersecciones o bifurcaciones? Estas preguntas guían el diseño del algoritmo.
Observa la superficie de la pista. ¿Es lisa o rugosa? Una superficie rugosa puede afectar la tracción del robot. Esto afectaría la precisión del seguimiento. La iluminación del ambiente es otro factor. Una iluminación variable puede afectar la lectura de los sensores.

Diseño del Algoritmo
El algoritmo controla el movimiento del robot. Un algoritmo común es el control PID (Proportional-Integral-Derivative). Este algoritmo ajusta la velocidad de los motores. Lo hace basado en el error entre la posición deseada y la posición actual de la línea. Es una opción robusta.
Otro enfoque es un algoritmo basado en lógica difusa. Este algoritmo permite manejar la incertidumbre. Es útil cuando la lectura de los sensores es ruidosa. Se pueden definir reglas basadas en la posición de la línea detectada. Estas reglas determinan la velocidad de los motores.

Considera la respuesta del robot a las intersecciones. ¿Debe seguir una línea específica? ¿Debe seguir la línea que tenga el ángulo más agudo? ¿Debe ser programable la ruta que seguirá? La estrategia para las intersecciones depende del problema.
Implementación y Pruebas
La implementación implica programar el microcontrolador. Se utiliza un lenguaje de programación como C++ o Python. Se necesita una biblioteca para controlar los sensores y los motores. La programación es un paso crítico.

Las pruebas son esenciales. Se empieza con pruebas simples. Se prueba el robot en líneas rectas. Luego se aumenta la complejidad. Se introducen curvas y luego intersecciones. Se ajustan los parámetros del algoritmo durante las pruebas.
Se debe observar el comportamiento del robot. ¿Oscila demasiado? ¿Se sale de la línea en las curvas? ¿Responde correctamente a las intersecciones? Se hacen ajustes hasta que el robot siga la línea de manera confiable. La depuración es un proceso iterativo.
Optimización
Después de la implementación inicial, se busca optimizar el rendimiento. Esto incluye ajustar los parámetros del algoritmo. También puede involucrar mejorar el diseño mecánico del robot. La optimización es un proceso continuo.
Se puede ajustar la ganancia del controlador PID. Se puede modificar la lógica difusa. Se pueden agregar sensores adicionales para mejorar la detección. Pequeños cambios pueden mejorar significativamente el rendimiento.
Finalmente, se documenta el proceso. Se documenta el diseño, el algoritmo y los resultados de las pruebas. Esta documentación es valiosa para futuras mejoras y para compartir el conocimiento. El desarrollo de un robot es un viaje de aprendizaje.





