La ecuación del plano que pasa por tres puntos no colineales (es decir, que no están sobre la misma línea) se determina encontrando un vector normal al plano. Este vector normal es perpendicular a dos vectores contenidos en el plano, que podemos obtener a partir de los tres puntos dados.
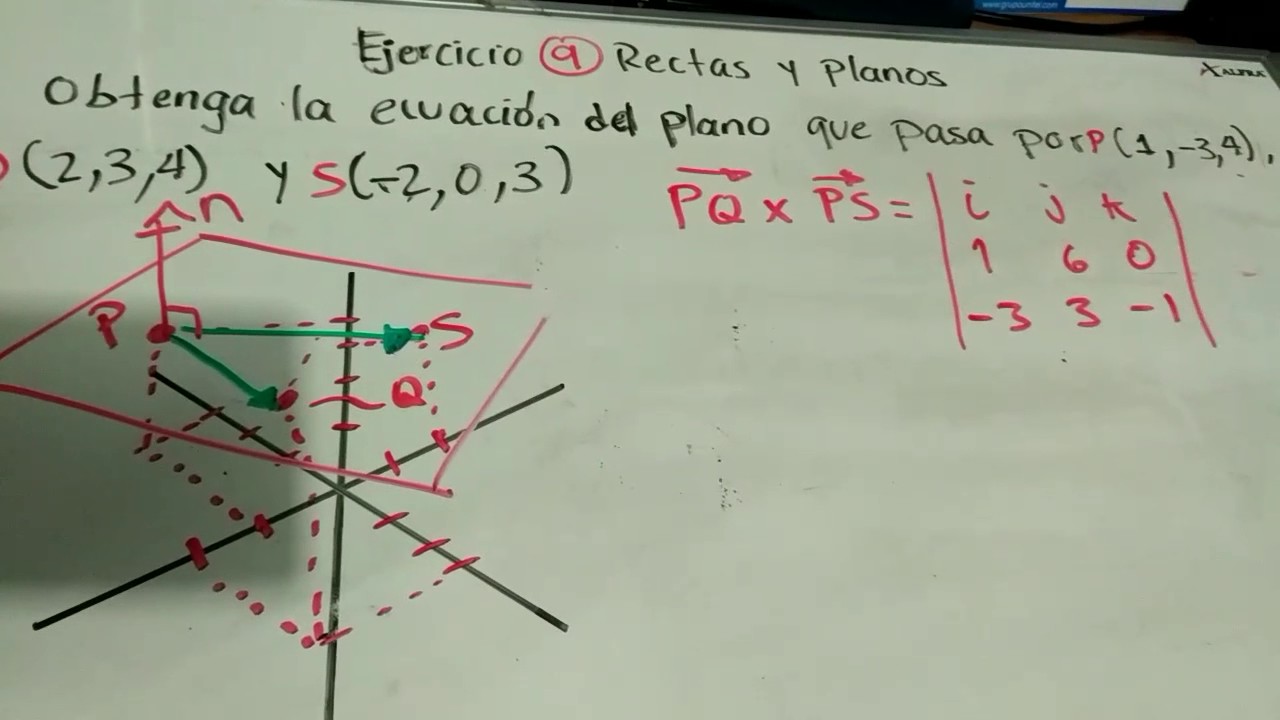
Cálculo del Vector Normal: Dados tres puntos P(x₁, y₁, z₁), Q(x₂, y₂, z₂) y R(x₃, y₃, z₃), primero calculamos dos vectores en el plano: PQ = Q - P = (x₂-x₁, y₂-y₁, z₂-z₁) y PR = R - P = (x₃-x₁, y₃-y₁, z₃-z₁). El vector normal n al plano se obtiene mediante el producto cruz de estos dos vectores: n = PQ x PR.
Ecuación del Plano: Una vez que tenemos el vector normal n = (a, b, c) y un punto en el plano (por ejemplo, P(x₁, y₁, z₁)), podemos escribir la ecuación del plano como: a(x - x₁) + b(y - y₁) + c(z - z₁) = 0. Esta es la forma punto-normal de la ecuación del plano. Desarrollando esta ecuación, obtenemos la forma general de la ecuación del plano: ax + by + cz + d = 0, donde d = -ax₁ - by₁ - cz₁.
Must Read
Ejemplo 1: Encuentra la ecuación del plano que pasa por los puntos P(1, 0, 0), Q(0, 1, 0) y R(0, 0, 1). Primero calculamos los vectores PQ = (-1, 1, 0) y PR = (-1, 0, 1). Luego, calculamos el producto cruz: n = PQ x PR = (1, 1, 1). Finalmente, usando el punto P(1, 0, 0) y el vector normal (1, 1, 1), la ecuación del plano es: 1(x - 1) + 1(y - 0) + 1(z - 0) = 0, que se simplifica a x + y + z - 1 = 0.

Ejemplo 2: Encuentra la ecuación del plano que pasa por los puntos A(2, 1, -1), B(0, 3, 2) y C(1, -5, 0). Calculamos AB = (-2, 2, 3) y AC = (-1, -6, 1). El vector normal es n = AB x AC = (20, -1, 14). Usando el punto A(2, 1, -1), la ecuación del plano es: 20(x - 2) - 1(y - 1) + 14(z + 1) = 0, lo que simplifica a 20x - y + 14z - 25 = 0.
Aplicaciones Reales: Este concepto tiene amplias aplicaciones en diversas áreas. En gráficos por computadora, se utiliza para definir superficies planas en modelos 3D. En ingeniería civil, se emplea para el diseño de estructuras y la determinación de planos de referencia. En navegación, se utiliza para calcular la trayectoria de objetos en el espacio, considerando planos definidos por puntos de referencia.