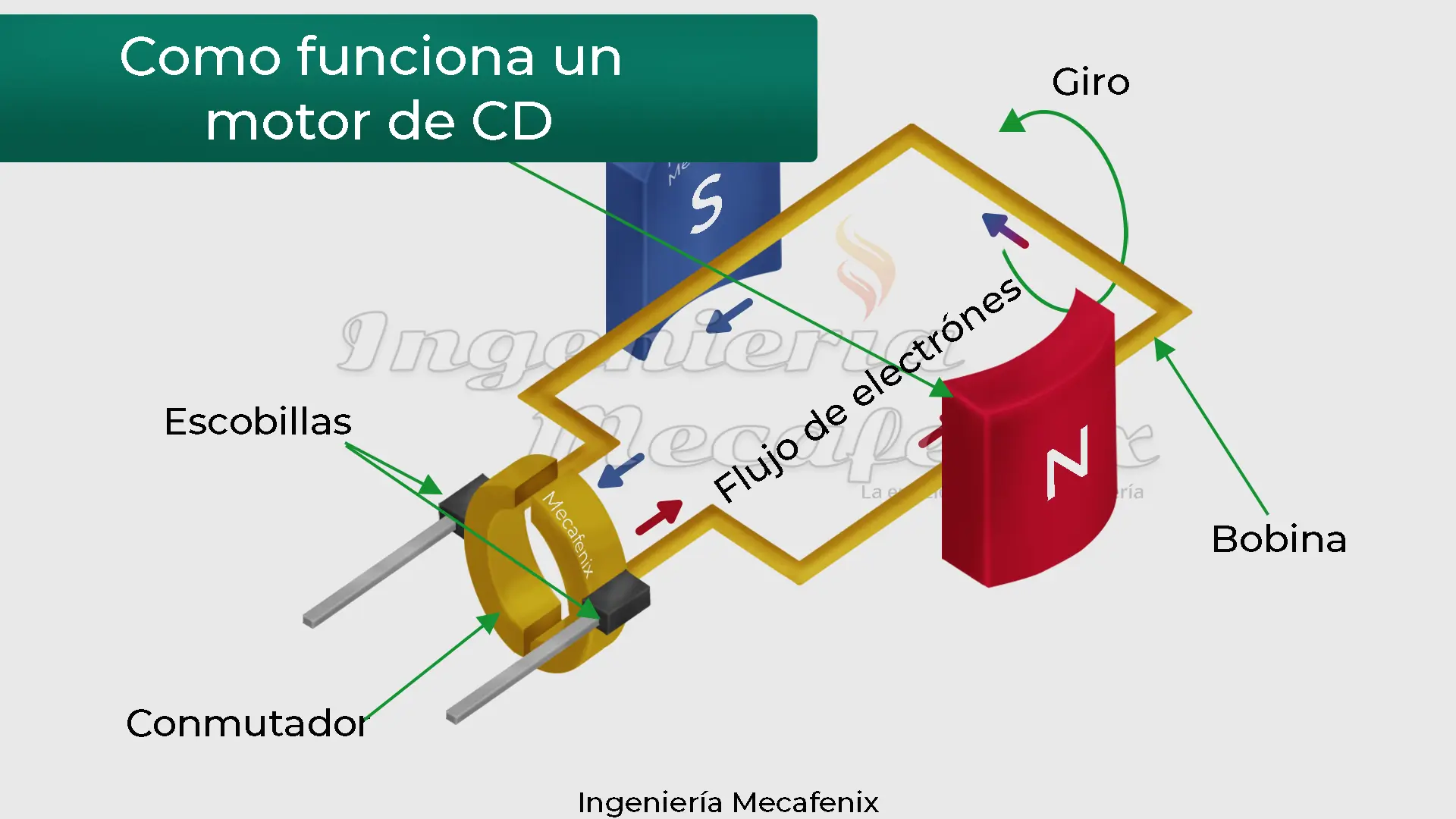
El control de motores de CD es un tema fundamental en la ingeniería. Implica manipular la velocidad y la dirección de rotación. Esto se logra aplicando diferentes técnicas y estrategias.
Entendiendo el Problema
Primero, identifiquemos el objetivo preciso. ¿Qué se busca controlar? ¿La velocidad, la posición o el torque del motor? Supongamos que el objetivo es mantener una velocidad constante. Consideremos las posibles perturbaciones. Estas incluyen cambios en la carga aplicada al motor o fluctuaciones en la tensión de alimentación.
Segundo, analicemos las limitaciones del sistema. ¿Cuál es el rango de voltajes y corrientes permitidos para el motor? ¿Qué precisión se necesita en el control? ¿Qué recursos de cómputo están disponibles si vamos a implementar un control digital?
Must Read
Identificando Asunciones
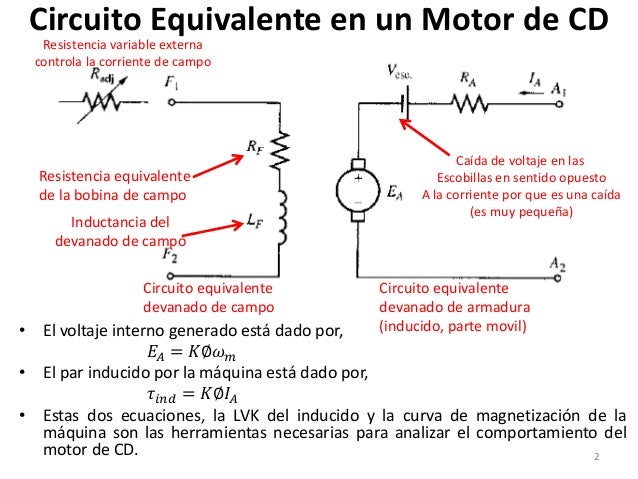
Asumimos que el motor de CD está caracterizado. Esto significa que conocemos sus parámetros eléctricos y mecánicos. Estos incluyen la resistencia del inducido, la inductancia del inducido y la constante de par/velocidad. Asumimos que podemos medir la velocidad del motor. Esto se hace con un encoder o un tacómetro.
Asumimos que la alimentación del motor es estable. Sin embargo, este puede no ser siempre el caso. Por lo tanto, será importante considerar esto en el diseño del control. Asumimos que conocemos el rango de cargas que el motor va a enfrentar.
Evaluando Opciones de Control
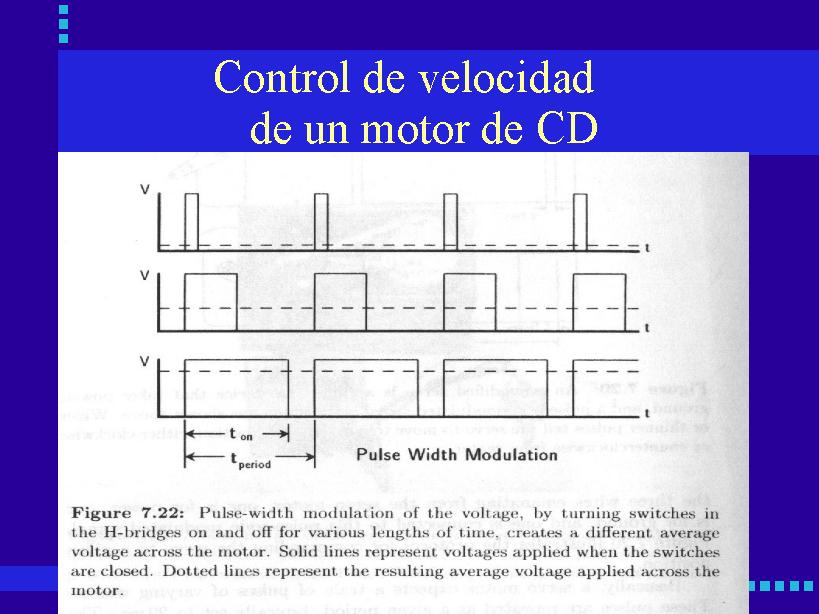
Existen varias estrategias de control disponibles. Una opción simple es el control de lazo abierto. Esto consiste en aplicar un voltaje constante al motor. No requiere realimentación. Es susceptible a perturbaciones.
El control de lazo cerrado utiliza realimentación. Mide la velocidad del motor. Compara con la velocidad deseada. Ajusta el voltaje aplicado para corregir errores. El control PID es una técnica común de control de lazo cerrado. Es versátil. Se puede ajustar para diferentes aplicaciones.

Otra opción es el control por modos deslizantes. Este control es robusto. Es resistente a las perturbaciones. Es más complejo de implementar que el control PID. El control predictivo es otra alternativa. Este utiliza un modelo del sistema para predecir el comportamiento futuro. Optimiza el control basado en esta predicción.
Implementando el Control PID
Si elegimos el control PID, debemos sintonizar los parámetros del controlador. Estos incluyen la ganancia proporcional (Kp), la ganancia integral (Ki) y la ganancia derivativa (Kd). Existen diferentes métodos para sintonizar el PID. El método de Ziegler-Nichols es una opción. El método de Cohen-Coon es otra opción. La sintonización manual es también posible, aunque requiere experiencia.
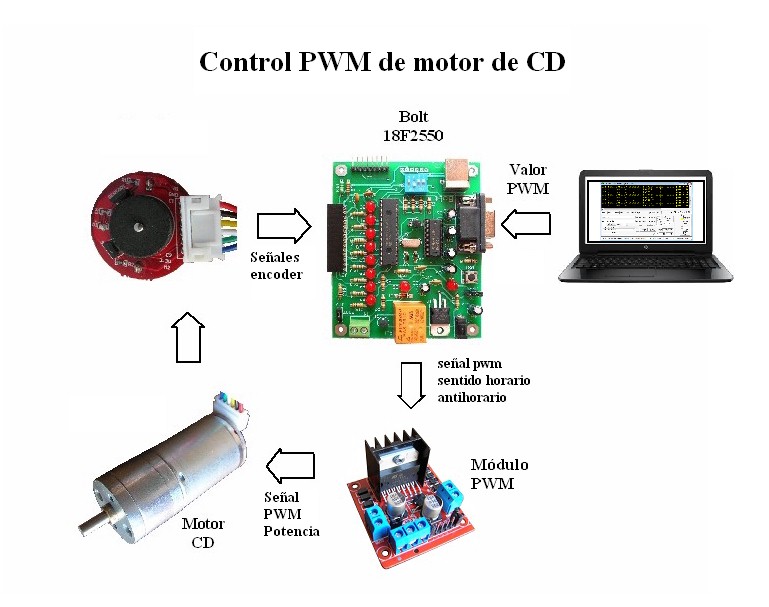
Implementamos el control PID en un microcontrolador. Usamos un sensor para medir la velocidad del motor. El microcontrolador calcula la señal de control. Aplica el voltaje al motor a través de un puente H. Este permite controlar la dirección del motor.

Consideraciones Adicionales
Es importante considerar la protección del motor. Esto incluye la protección contra sobrecorriente. La protección contra sobrevoltaje es también importante. Implementar un circuito de frenado dinámico puede ser útil. Esto detiene el motor rápidamente cuando es necesario. Se necesita elegir componentes adecuados. Esto incluye el puente H y la fuente de alimentación.
Realizamos pruebas exhaustivas del sistema de control. Esto incluye pruebas de respuesta a escalón. Pruebas de respuesta a rampa. Pruebas de respuesta a perturbaciones. Ajustamos los parámetros del controlador. Esto se hace para obtener el rendimiento deseado. Documentamos el diseño del sistema. Incluye los diagramas de circuito y el código del microcontrolador.

Conclusiones Razonadas
El control de motores de CD requiere un enfoque sistemático. Implica la identificación del problema. La evaluación de opciones. La implementación y las pruebas. El control PID es una técnica popular. Puede proporcionar un buen rendimiento. Existen alternativas más avanzadas. Se usan para aplicaciones más exigentes.
La selección de la técnica de control adecuada depende de los requisitos específicos de la aplicación. La complejidad. El costo. La precisión requerida. La robustez necesaria. Una buena comprensión de los principios básicos del control de motores de CD es fundamental. Esto permite desarrollar soluciones efectivas y eficientes.
El éxito del control de motores de CD se basa en la aplicación de principios de ingeniería sólidos. La atención al detalle. La perseverancia. La capacidad de aprender de los errores. El entendimiento de las limitaciones. La implementación efectiva de un control que cumpla las espectativas. El conocimiento profundo de los parámetros del motor.