¡Hola futuros ingenieros! ¿Listos para construir un robot móvil con Arduino? ¡Excelente! Este es un proyecto súper divertido y práctico. Vamos a repasar los puntos clave para que estén listos para el examen. ¡Ánimo!
Componentes Esenciales
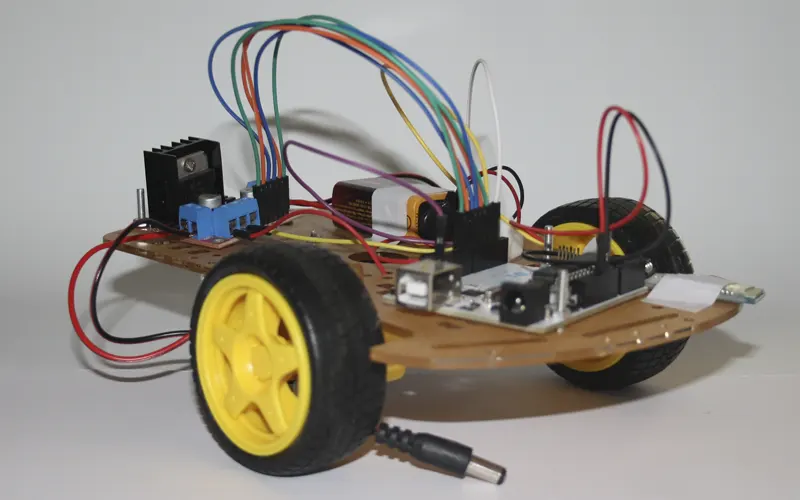
Primero, necesitamos los materiales básicos. No se asusten, la lista es manejable. Necesitamos una placa Arduino Uno. Esta es la unidad central de control. También necesitamos un chasis para el carro. Piensen en él como el esqueleto del robot. Finalmente, necesitamos motores DC y llantas. Sin ellos, ¡no podríamos movernos!
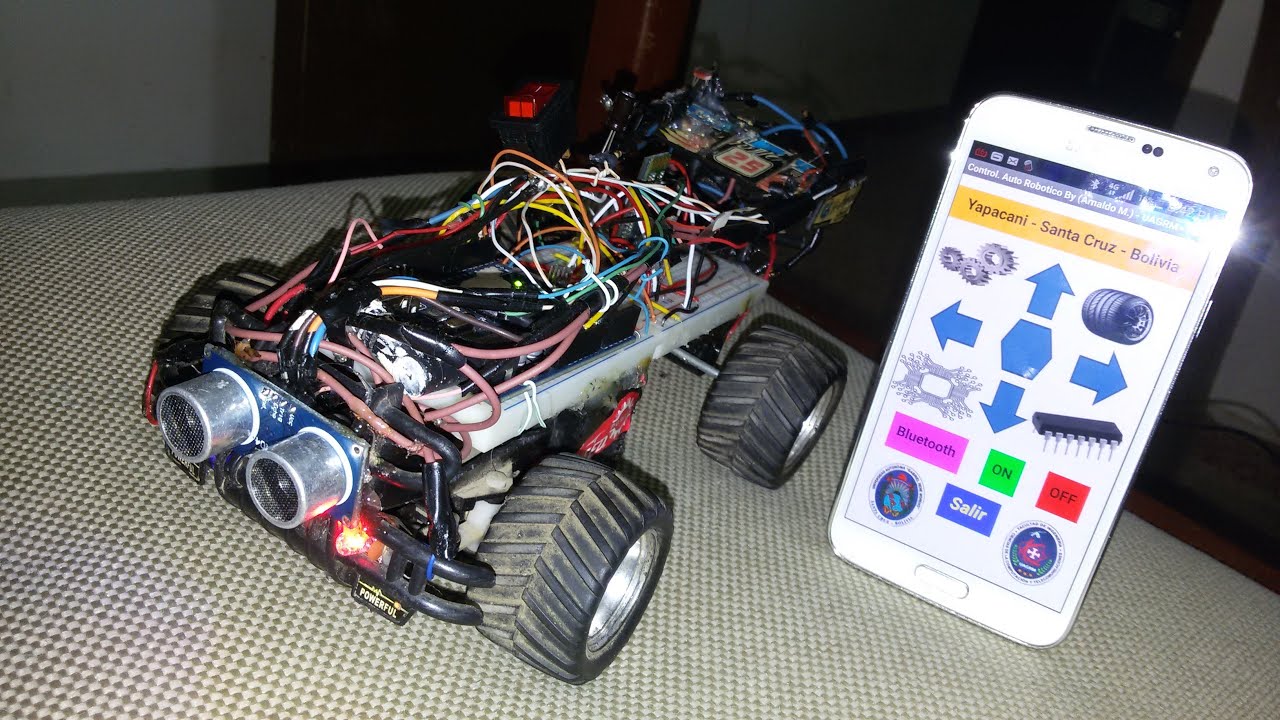
Además, necesitaremos un driver de motor. El driver controla la velocidad y dirección de los motores. Un sensor ultrasónico es opcional, pero muy útil. Nos permite detectar obstáculos. Cables jumper son esenciales para conectar todo. Y, por supuesto, una fuente de alimentación.
Must Read
El Chasis y los Motores
Montar el chasis es el primer paso físico. Asegúrense de seguir las instrucciones del fabricante. A veces requiere atornillar piezas. Sean pacientes y organizados. ¡La precisión es clave!
Luego, montamos los motores DC al chasis. Verifiquen que estén bien sujetos. Una conexión floja causará problemas después. Conectamos las llantas a los ejes de los motores. ¡Ya empieza a parecer un carro!
Conexiones Eléctricas
Ahora viene la parte divertida: las conexiones. Aquí es donde entra el driver de motor. Conecten los motores al driver. Cada driver tiene un diagrama. ¡Sigan el diagrama cuidadosamente!

El driver se conecta a la placa Arduino. Usen los cables jumper para esto. Generalmente, se usan pines digitales para controlar la dirección. También, se usan pines PWM para controlar la velocidad. Recuerden, PWM significa Pulse Width Modulation.
Conecten el sensor ultrasónico a la placa Arduino (si lo usan). Generalmente, se usa un pin para el trigger y otro para el echo. Consulten la hoja de datos del sensor. Allí encontrarán la información necesaria.
Finalmente, conecten la fuente de alimentación. Asegúrense de respetar la polaridad (+ y -). Una conexión incorrecta puede dañar los componentes. ¡Mucho cuidado!

Programación con Arduino IDE
El Arduino IDE es nuestro entorno de programación. Es aquí donde escribimos el código. El código le dice al carro qué hacer.
Primero, definimos los pines. Asignamos nombres a los pines que usamos. Esto hace que el código sea más legible. Luego, inicializamos los pines como entradas o salidas. Depende de si estamos recibiendo información o enviándola.
Escribimos el código para controlar los motores. Usamos funciones como digitalWrite() para controlar la dirección. Usamos funciones como analogWrite() para controlar la velocidad. Experimenten con diferentes valores.

Si usan el sensor ultrasónico, escriban el código para leer las distancias. Calculen la duración del pulso del echo. Usen esa duración para calcular la distancia al obstáculo. Pueden usar la formula: distancia = (velocidad del sonido * tiempo) / 2.
Escriban un programa principal que combine todo. El programa debe controlar el movimiento del carro. Debe evitar obstáculos usando el sensor ultrasónico. ¡Este es el corazón del proyecto!
Resolución de Problemas
¿El carro no se mueve? Verifiquen las conexiones eléctricas. Asegúrense de que la fuente de alimentación funciona. Revisen el código en busca de errores.

¿El sensor ultrasónico no funciona? Verifiquen las conexiones de los pines. Asegúrense de que el código esté correcto. A veces, el sensor necesita un pequeño ajuste.
Resumen
¡Ya casi lo logran! Recuerden los componentes clave: Arduino Uno, chasis, motores, driver, sensor (opcional). Recuerden las conexiones: motores al driver, driver a Arduino, sensor a Arduino, fuente de alimentación. Recuerden la programación: definir pines, controlar motores, leer el sensor. ¡Y no olviden solucionar problemas paso a paso!
¡Mucha suerte en el examen! Confío en que lo harán genial. ¡Adelante, futuros ingenieros!