¡Hola! Vamos a explorar un tema interesante: el análisis de posición de mecanismos articulados usando ecuaciones de cierre. Suena complicado, pero lo desglosaremos para que sea fácil de entender. Piénsalo como resolver un rompecabezas mecánico.
¿Qué es un Mecanismo Articulado?
Un mecanismo articulado es un conjunto de barras o eslabones conectados entre sí por juntas. Estas juntas permiten que las barras se muevan relativamente entre sí. Imagina las piezas de un brazo robótico o las bisagras de una puerta. Esos son ejemplos de mecanismos articulados.
Cada barra o eslabón tiene una longitud fija. Las juntas permiten movimientos de rotación o traslación (desplazamiento). La combinación de barras y juntas crea un sistema que puede transformar un movimiento de entrada en un movimiento de salida diferente.
Must Read
Análisis de Posición: La Clave
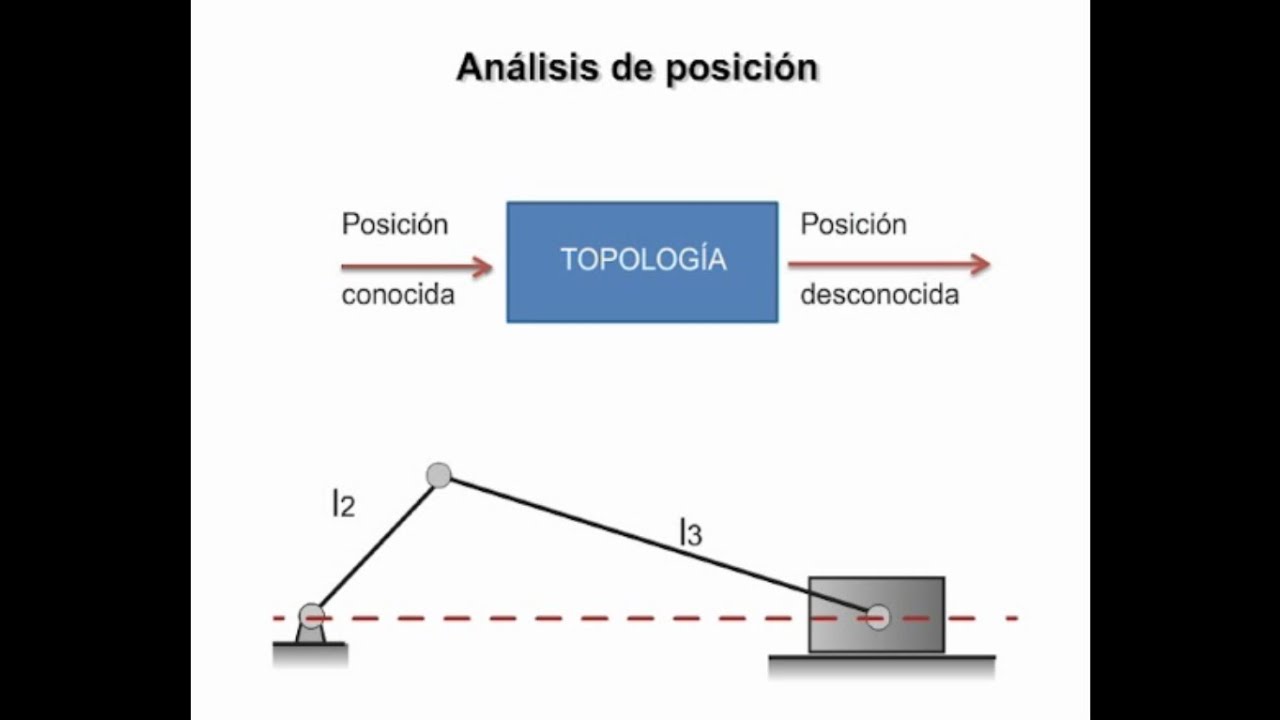
El análisis de posición consiste en determinar la posición de cada parte del mecanismo en un momento dado. Conocer estas posiciones es crucial para entender cómo funciona el mecanismo y para diseñarlo correctamente. Imagina que quieres diseñar un robot para que agarre un objeto en una posición específica. Necesitas saber con precisión dónde estarán cada una de sus articulaciones para que pueda alcanzar el objetivo.
En otras palabras, el análisis de posición responde a la pregunta: "¿Dónde está cada cosa en el mecanismo en este instante?". Esto es importante para evitar colisiones, asegurar un movimiento suave y predecir el comportamiento del mecanismo.
Ecuaciones de Cierre: El Método
Las ecuaciones de cierre son relaciones matemáticas que describen la geometría del mecanismo. Estas ecuaciones se basan en el hecho de que el mecanismo forma un circuito cerrado. Piensa en un cuadrilátero articulado; sus cuatro lados forman un circuito cerrado.
Estas ecuaciones expresan las relaciones entre las longitudes de los eslabones, los ángulos de las juntas y las coordenadas de los puntos clave del mecanismo. Para encontrar la posición, resolvemos estas ecuaciones.

¿Cómo se Construyen las Ecuaciones de Cierre?
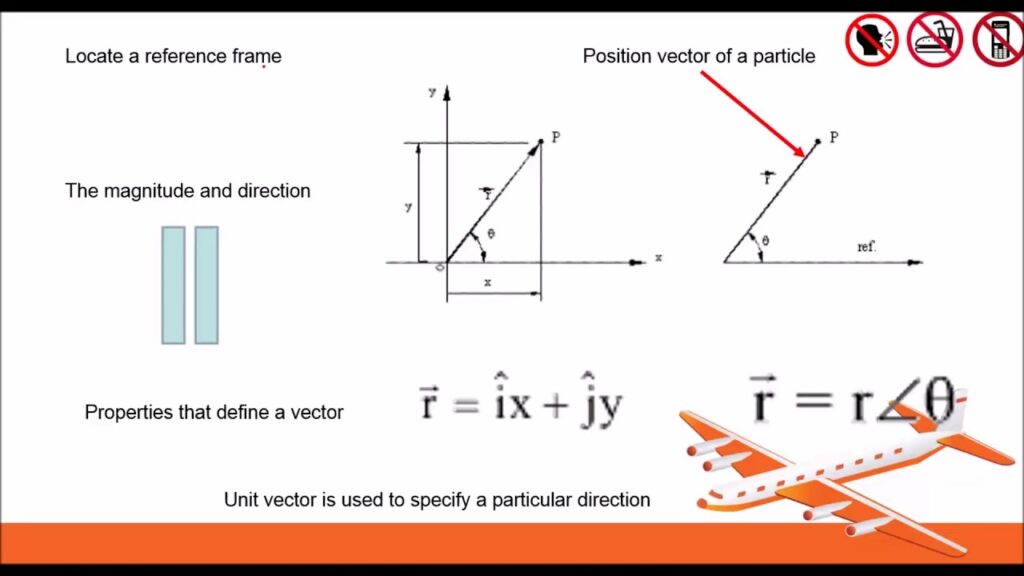
Generalmente, las ecuaciones de cierre se construyen utilizando trigonometría. Se proyectan las longitudes de los eslabones sobre los ejes x e y. Se utilizan las funciones seno y coseno para relacionar las longitudes de los eslabones con los ángulos de las juntas.
Por ejemplo, si tienes un eslabón de longitud L y ángulo θ, su proyección en el eje x sería Lcos(θ) y en el eje y sería Lsin(θ). Sumando estas proyecciones para todos los eslabones del circuito cerrado, obtienes las ecuaciones de cierre.
Ejemplo Sencillo: El Cuadrilátero Articulado
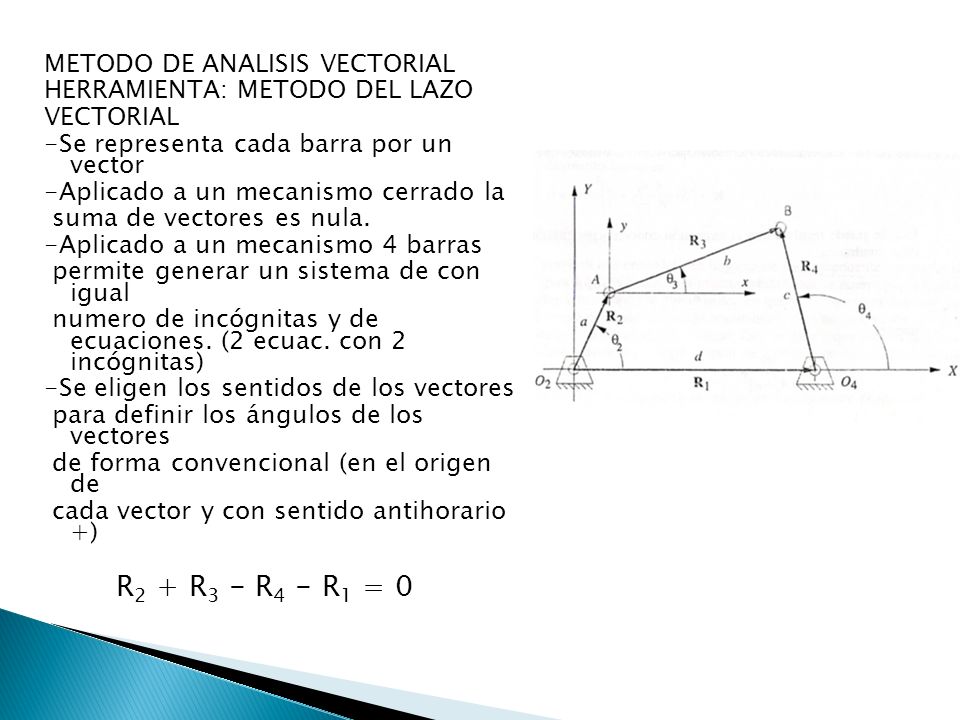
El cuadrilátero articulado es un mecanismo formado por cuatro eslabones unidos por cuatro juntas. Es un ejemplo clásico para entender las ecuaciones de cierre.

Imagina cuatro barras conectadas para formar un romboide. Las longitudes de las barras son L1, L2, L3, y L4. Los ángulos entre las barras y un eje de referencia son θ1, θ2, θ3, y θ4. Las ecuaciones de cierre se obtienen sumando las proyecciones de las longitudes de los eslabones en los ejes x e y e igualándolas a cero, dado que forman un circuito cerrado.
Este sistema de ecuaciones (dos ecuaciones, ya que tenemos proyecciones en x e y) nos permite resolver para las incógnitas, que usualmente son los ángulos de las juntas. Una vez que conocemos los ángulos, podemos determinar la posición de cada punto del mecanismo.

Resolviendo las Ecuaciones
Resolver las ecuaciones de cierre puede ser complicado, especialmente para mecanismos más complejos. A menudo, se utilizan métodos numéricos para encontrar soluciones aproximadas.
Métodos numéricos son algoritmos que buscan la solución iterativamente, acercándose cada vez más a la respuesta correcta. El método de Newton-Raphson es un ejemplo común. También, se pueden usar software de simulación para modelar el mecanismo y visualizar su movimiento, ayudando a validar los resultados del análisis.
Conclusión
El análisis de posición mediante ecuaciones de cierre es una herramienta fundamental para el diseño y la comprensión de mecanismos articulados. Aunque puede parecer desafiante al principio, al entender los conceptos básicos y practicar con ejemplos sencillos, se vuelve más accesible. ¡Anímate a explorar este fascinante campo de la ingeniería!