¡Hola! Vamos a sumergirnos en ROS, o el Robot Operating System. No es un sistema operativo completo como Windows o macOS, ¡sino más bien un framework que ayuda a programar robots!
¿Qué es ROS exactamente?
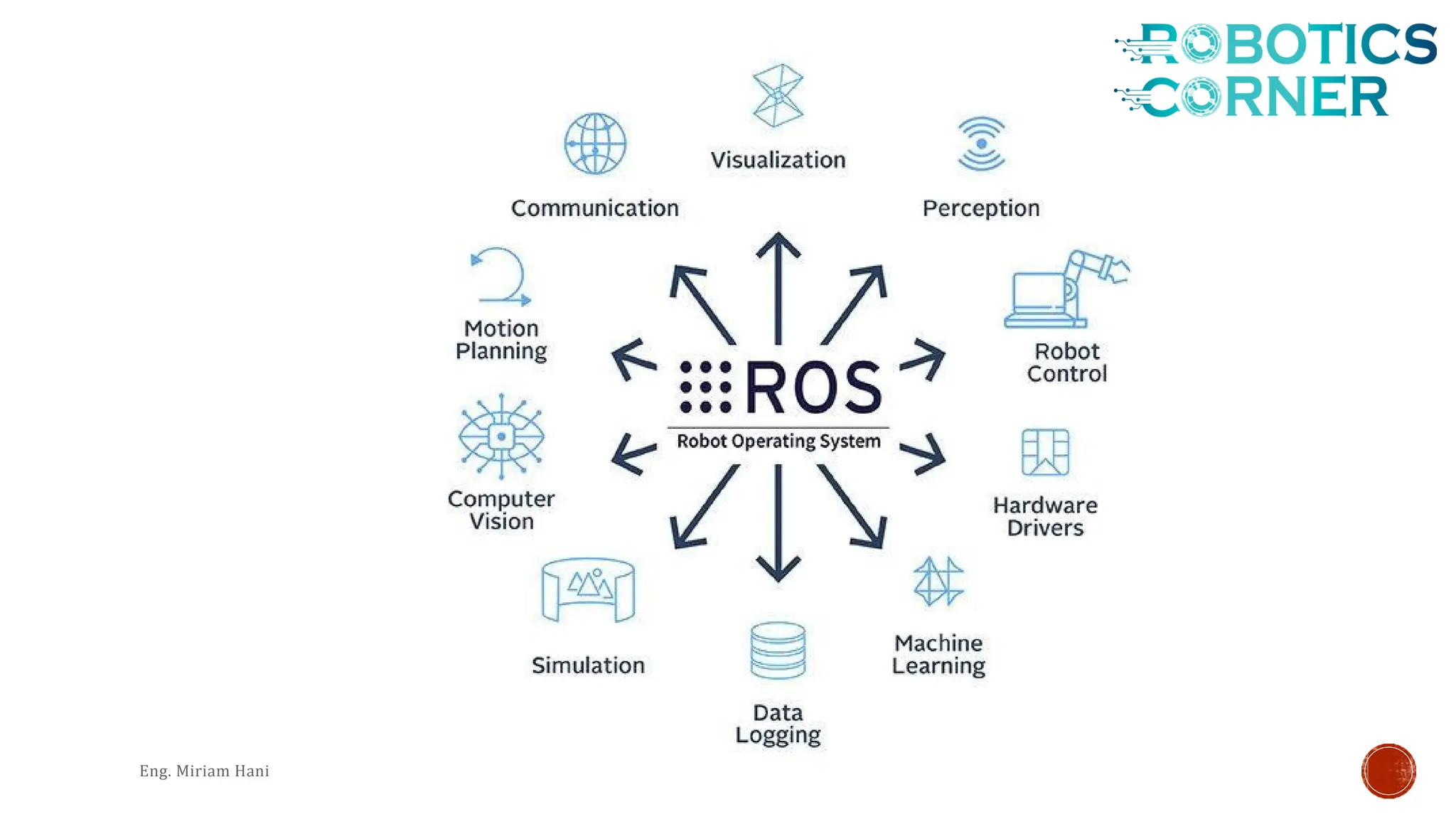
Imagina que tienes un equipo de robots y cada uno necesita hacer algo diferente: uno mueve las ruedas, otro usa la cámara, otro analiza los datos. ROS es como el jefe de equipo que organiza a todos para que trabajen juntos. Piensa en él como un conjunto de herramientas y librerías que facilitan la comunicación entre diferentes partes de un robot (software y hardware).
Componentes Clave de ROS
ROS se basa en algunos conceptos fundamentales:
Must Read
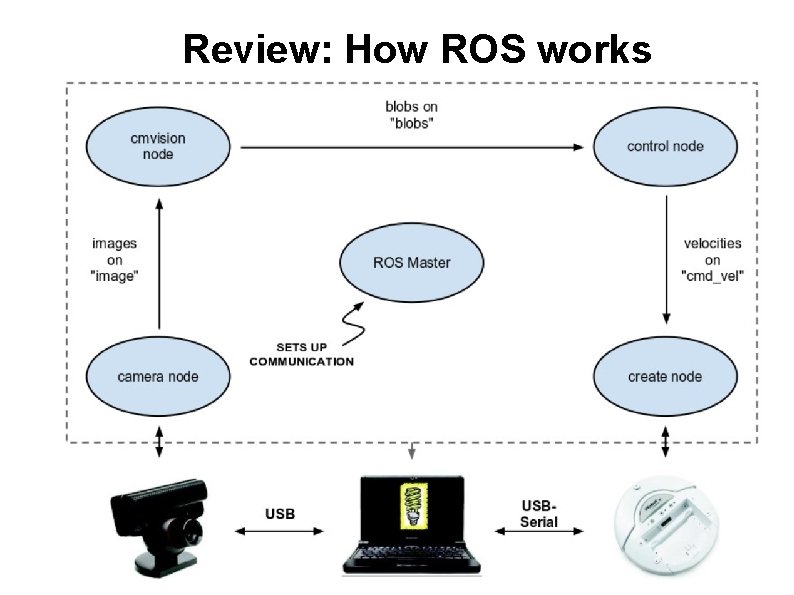
- Nodos (Nodes): Son pequeños programas que hacen una tarea específica. Por ejemplo, un nodo podría controlar un motor, otro leer datos de un sensor de distancia y otro analizar imágenes. Piensa en cada nodo como un mini-programa.
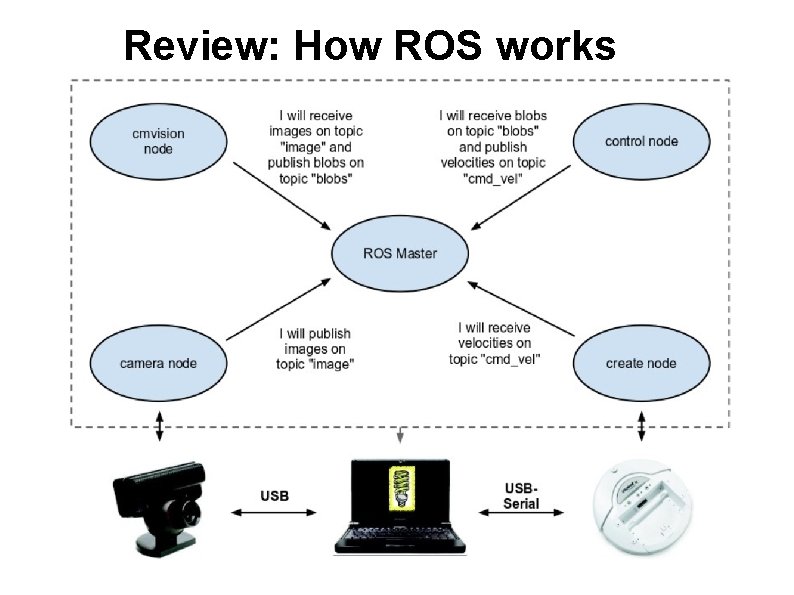
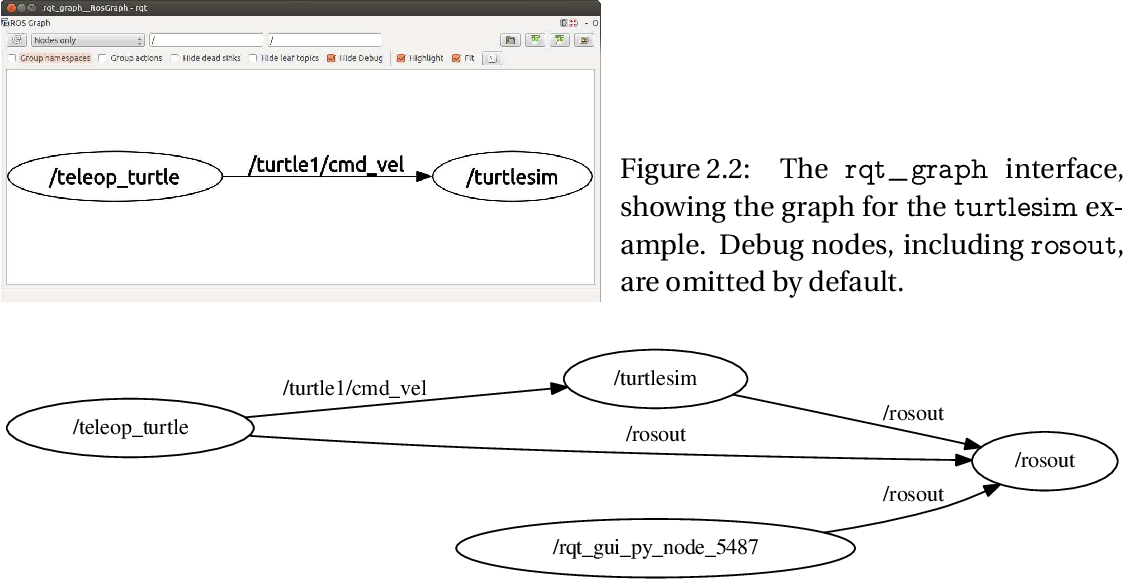
- Temas (Topics): Son canales de comunicación. Los nodos envían información a los temas y otros nodos se suscriben a los temas para recibir esa información. Imagina un tablero de anuncios donde los nodos publican y leen mensajes. Por ejemplo, un nodo de sensor publica datos de distancia en un tema llamado "/distancia", y un nodo de control de movimiento se suscribe a ese tema para usar esos datos.
- Mensajes (Messages): Son los datos que se intercambian a través de los temas. Pueden ser números, texto, datos de sensores, etc. Los mensajes son como las notas que se pegan en el tablero.
- Servicios (Services): Son peticiones de información. Un nodo puede solicitar un servicio a otro nodo y recibir una respuesta. Piensa en esto como hacer una pregunta directa a otro nodo.
Un Ejemplo Sencillo
Imagina un robot simple que evita obstáculos. Tendríamos:
- Nodo Sensor de Distancia: Lee la distancia a los objetos cercanos y publica esa información en el tema "/distancia".
- Nodo Controlador de Movimiento: Se suscribe al tema "/distancia". Si la distancia es muy pequeña (hay un obstáculo), envía un comando al tema "/velocidad_motores" para que el robot se detenga o gire.
- Nodo Controlador de Motores: Se suscribe al tema "/velocidad_motores" y controla los motores del robot para que se muevan según el comando recibido.
¡Mira! Los tres nodos trabajan juntos para que el robot evite obstáculos. La comunicación entre ellos se realiza a través de temas y mensajes.
¿Cómo Empezar con ROS?
Lo primero es instalar ROS. Te recomiendo usar una distribución como ROS Noetic Ninjemys. Hay muchos tutoriales en la página oficial de ROS. También puedes usar simuladores como Gazebo para probar tus programas sin necesidad de tener un robot real. Recuerda que la práctica hace al maestro, así que ¡empieza a experimentar!
ROS es una herramienta muy poderosa y versátil. Con un poco de práctica, podrás crear robots increíbles. ¡Anímate y comienza tu aventura en el mundo de la robótica con ROS!